À l’Université Laval, (Québec, Canada), le cours d’optique PHY-2004/GPH-2004 des programmes de Physique et Génie Physique se donne à chaque session d’hiver. Il s’agit du premier contact des étudiants de premier cycle avec l’optique. Après avoir donné le cours une première fois avec mon collègue Prof. Réal Vallée, il est apparu essentiel de compléter les présentations interactives en classe avec des notes qui rassemblent les concepts et les équations importantes dans un document relativement simple d’accès pour faciliter l’étude. Il existe déjà plusieurs livres d’optique, dont plusieurs d’une qualité exceptionnelle, alors pourquoi encore un autre? Je crois qu’il reste des aspects de l’optique qui n’ont pas été couverts de façon assez pédagogique à mon goût. En effet, les équations sont présentes, sans fautes, mais la méthode fait défaut. Ainsi, les critères principaux qui guident la création de ce document sont la clarté des objectifs de chaque section, la concision, la simplicité de la présentation, l’utilisation d’animations (vidéo, 3D) lorsque possible pouvant faciliter la compréhension et finalement, la disponibilité de tout le matériel produit (incluant le livre lui-même).
Pour cette deuxième édition, Mireille Quémener Ingénieure se joint à moi pour améliorer le texte et la rigueur de celui-ci, et pour produire du nouveau matériel, surtout au niveau de la conception optique qui enrichit le contenu du présent livre. Malgré tout, et suivant les traces de David Griffiths dans son livre "Quantum Mechanics", le texte suivra les conventions et utilisera le “je”, puisque ceci allège le texte et que de toute façon, il est vrai qu’une personne a écrit ces lignes, quelle qu’elle soit.
Ce livre est disponible sur le Web, en Portable Document Format (PDF), et une vieille version en livre interactif pour tous les appareils acceptant le format EPUB de Apple (iBookStore). Tout le texte LaTeX est disponible sur GitHub. Des liens Web sont insérés lorsque possible pour les différents documents 3D, qui sont donnés en format COLLADA™ (.dae) ou en film (.mov). Les animations ont été faites par l’auteur et les photos proviennent de différentes banques de données comme celles du Centre d’Optique Photonique et Laser (COPL) ou de Wikimedia. Toutes les photographies sont utilisées avec permission.
Pour terminer, ce livre est en évolution constante, et il reste
probablement des erreurs de formattage un peu partout depuis la
conversion du EPUB original. Tout commentaire permettant d’augmenter la
qualité du contenu de ce livre est grandement apprécié, par courriel
avec la ligne de sujet “Livre Optique” ou sur la page du site de
distribution.
Daniel C. Côté, Ph.D., P. Eng.,
dccote@cervo.ulaval.ca
Mireille Quémener, M.Sc., Ing.,
mireille.quemener@cervo.ulaval.ca
https://www.dccmlab.ca
Le contenu de ce livre s’adresse aux étudiants de premier cycle en physique et génie physique à l’université qui en sont à leur premier contact avec l’optique. Il est normalement nécessaire d’avoir une formation en physique des ondes et en électromagnétisme, et idéalement aussi en ondes électromagnétiques. Typiquement ce cours se donnerait en deuxième année d’une formation de trois ou quatre ans. Ce livre est séparé en plusieurs chapitres, eux-mêmes séparés en sections. Bien que les objectifs de chaque section soient bien indiqués au début de celles-ci, ils sont répétés ici pour faciliter la préparation et l’étude. Notez que les verbes utilisés pour décrire ces objectifs sont importants: la Taxonomie de Bloom associe à six niveaux de compétences des verbes d’action, tel que montré à la Table Préface.1. Ces fameux verbes d’action déterminent le type de question appropriée pour l’évaluation.
| Connaissance | définir, identifier, nommer, énumérer |
| dire avec ses propres mots … | |
| Compréhension | décrire, résumer, expliquer, |
| interpréter … | |
| Application | utiliser, résoudre, construire, |
| démontrer, calculer, dériver | |
| Analyse | analyser, distinguer, comparer, faire le choix … |
| Synthèse | concevoir, rédiger, planifier, réaliser, |
| faire un exposé, produire, mettre au point, … | |
| Évaluation | justifier, défendre, juger, argumenter, |
| critiquer, évaluer ... |
Chapitre 1 –
Expliquer la signification des termes dans les équations de Maxwell ;
Savoir dériver et utiliser l’équation d’onde de Helmholtz ;
Expliquer et utiliser les bases complètes (sphériques, planes et autres) représentant les ondes dans les matériaux et dans le vide ;
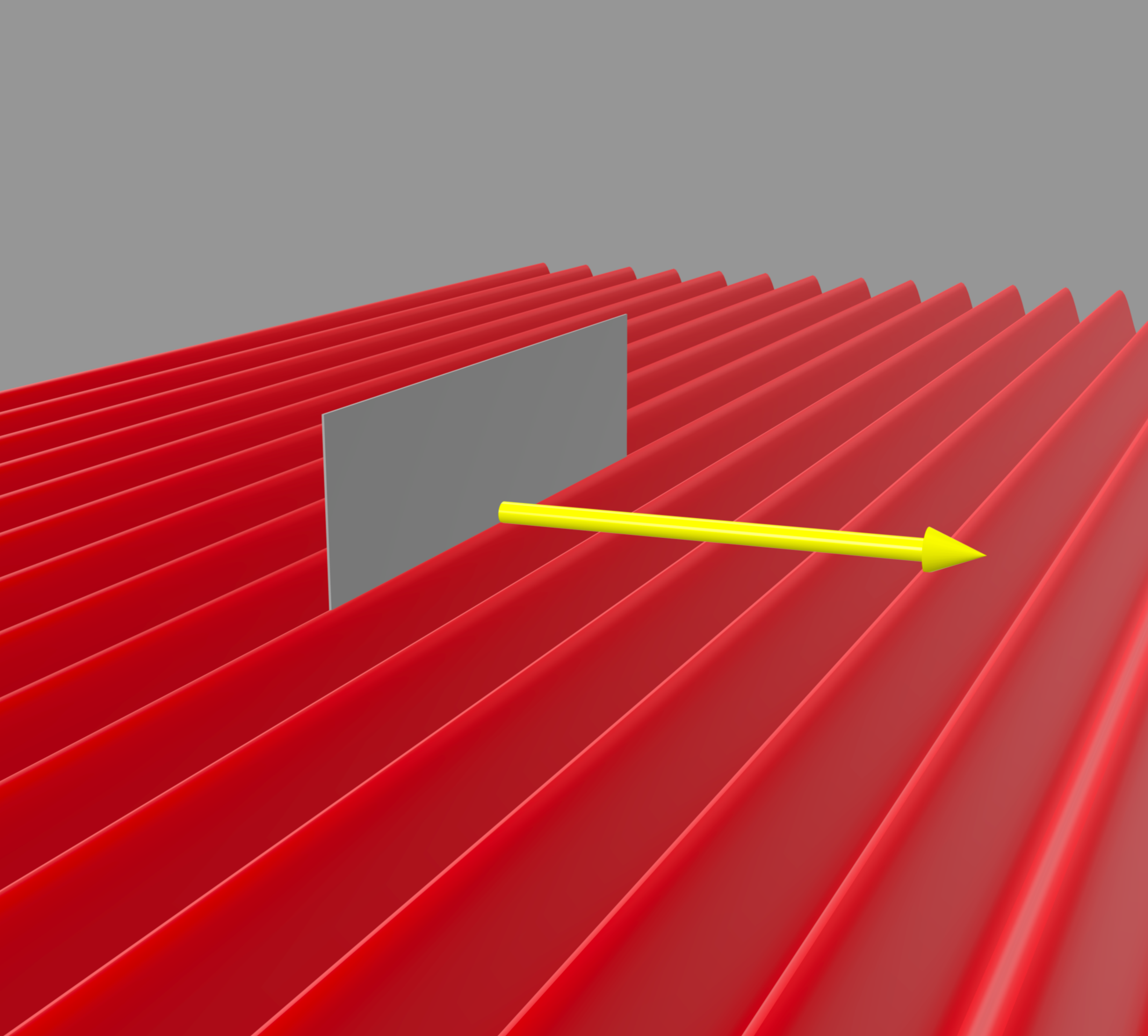
Expliquer le concept, savoir utiliser et identifier un front d’onde et un rayon ;
Interpréter, savoir calculer et utiliser le vecteur de Poynting.
Expliquer l’origine de l’indice de réfraction et son impact sur les ondes ;
Définir et savoir utiliser la loi de la réflexion ;
Définir et savoir utiliser la loi de Snell pour la réfraction ;
Définir, identifier et utiliser les polarisations \(\hat{s}\) et \(\hat{p}\) ;
Savoir utiliser les coefficients de Fresnel pour les deux polarisations ;
Expliquer l’origine et calculer l’angle de Brewster.
Chapitre 2 –
Faire le tracé de rayons pour les rayons importants et pour obtenir une image ;
Comprendre et expliquer l’origine de la formation de l’image dans des systèmes simples et complexes et savoir calculer la position de l’image ;
Expliquer la différence entre une image réelle et une image virtuelle ;
Comprendre, expliquer et savoir faire des calculs impliquant les phénomènes qui régissent l’optique géométrique ;
Savoir utiliser la loi de l’imagerie, la loi de Lensmaker.
Définir et savoir utiliser les matrices représentant les différentes composantes simples pour transformer les rayons ;
Décrire et savoir utiliser le formalisme des matrices ABCD ;
Comprendre et savoir comment obtenir la condition d’imagerie, les plans principaux et les points nodaux d’un système complexe ;
Identifier la distance focale équivalente d’un système complexe ;
Calculer la position d’une image avec le formalisme matriciel ;
Résoudre des problèmes en utilisant le formalisme matriciel.
Définir et savoir identifier les diaphragmes d’entrée et de champ, les pupilles d’entrée et de sortie, les fenêtres d’entrée et de sortie ;
Expliquer l’importance des diaphragmes dans un instrument ;
Définir et savoir tracer le rayon principal et le rayon marginal d’une source ponctuelle ;
Définir le \(f\)-number d’un système ;
Savoir calculer la quantité de lumière captée par un système.
Obtenir des tracés de rayons à l’aide d’un logiciel simple.
Chapitre 3 –
Expliquer la diffraction et son origine physique, comprendre les conditions selon lesquelles une onde diffracte ou non ;
Expliquer le principe de Huygens-Fresnel ;
Savoir faire des calculs de diffraction pour des profils d’illuminations simples ou complexes ;
Comprendre, savoir expliquer et reconnaître que la diffraction de Fraunhofer correspond à la transformée de Fourier du champ électrique incident ;
Savoir faire la correspondance d’échelle pour les calculs de diffraction faisant appel aux transformées de Fourier, dans le cas de l’utilisation d’une lentille ou non ;
Savoir faire des calculs à l’aide de méthodes numériques pour obtenir le patron de diffraction d’un profil arbitraire ;
Connaître le critère de sélection pour les régimes de Fraunhofer et Fresnel, comprendre et appliquer ces critères pour résoudre des problèmes ;
Connaître et savoir identifier des paires de transformées de Fourier importantes.
Expliquer et savoir calculer les propriétés des réseaux de diffraction ;
Nommer, identifier et connaître les propriétés spécifiques des trois types de réseaux d’amplitude, de phase et blasé ;
Définir et expliquer l’intervalle spectral libre, la dispersion angulaire, la résolution et le pouvoir de résolution et savoir les utiliser dans des calculs.
Expliquer, savoir reconnaître et utiliser dans des calculs les fréquences spatiales transverses ;
Savoir calculer et obtenir l’étalonnage d’une transformée de Fourier discrète (numérique) ;
Expliquer et calculer les propriétés d’un filtre spatial, utiliser un filtre spatial sur des faisceaux ou des images.
Comprendre, expliquer et définir ce qu’est un faisceau gaussien ;
Connaître les différentes propriétés des faisceaux gaussiens: paramètre de Rayleigh (ou confocal), largeur de faisceau, rayon de courbure ;
Définir et savoir utiliser dans des calculs le rayon complexe d’un faisceau gaussien, savoir extraire la largeur du faisceau et son rayon de courbure ;
Être capable de passer d’une définition de largeur de faisceau à l’autre: champ électrique ou irradiance, 1/e, FWHM, HWHM ;
Résoudre des problèmes utilisant le formalisme matriciel pour la propagation de faisceaux gaussiens et leurs transformations dans des systèmes optiques.
Chapitre 4 –
Expliquer l’origine de l’optique non-linéaire en terme de densité de polarisation et susceptibilité ;
Expliquer l’importance de l’accord de phase et évaluer sa valeur numérique ;
Nommer des techniques pour obtenir l’accord de phase (critique et non-critique) ;
Être capable de choisir un cristal non-linéaire qui maximise la génération de fréquence voulue.
| Symbole | Définition |
|---|---|
| \(d\mathbf{A}\) | Élément de surface infinitésimal |
| \(A,B,C,D\) | Éléments d’une matrice \(2\times 2\) |
| \(\alpha\) | Paramètre d’une lentille GRIN |
| \(\mathbf{B}(\mathbf{r},t)\) | Densité de flux magnétique |
| \(c\) | Vitesse de la lumière dans le vide |
| \(\chi\), \(\chi^2\) | Susceptibilités linéaire et non-linéaire |
| \(d_o, d_i\) | Distance objet/image à la lentille |
| \(\mathbf{E}(\mathbf{r},t)\) | Champ électrique complexe |
| \(\bar{\mathbf{E}}(\mathbf{r},t)\) | Champ électrique réel |
| \(\mathbf{E}_\circ\) | Champ électrique constant |
| \(\mathbf{E}_\sigma\), \(\mathbf{E}_\Sigma\) | Champ diffracté à l’écran \(\sigma\) / obstacle \(\Sigma\) |
| \(\epsilon_\circ\) | Permittivité du vide |
| \(\epsilon\) | Permittivité d’un milieu, \(\epsilon=\epsilon_r\epsilon_\circ\) |
| \(\epsilon^\prime,\epsilon^{\prime\prime}\) | Parties réelle/imaginaire de \(\epsilon\) |
| \(\epsilon_r\) | Permittivité relative |
| \(f\) | Distance focale (ou fréquence en Hz) |
| \(F_1,F_2\) | Points focaux d’une lentille |
| \(f/\#\) | f-number |
| \(\mathbf{J}(\mathbf{r},t)\) | Densité de courant |
| \(\mathbf{k}\) | Vecteur d’onde 3D (\(\frac{\omega n}{c}\hat{k}\)) |
| \(|\mathbf{k}|\), \(k\) | Nombre d’onde \(k\equiv\frac{\omega n}{c}=\frac{2\pi}{\lambda}\) |
| \(\mathbf{k}_\perp\), \(\mathbf{k}_\parallel\) | Composantes transverse et longitudinale de \(\mathbf{k}\) |
| \(\hat{k}\) | Vecteur d’onde unitaire |
| \(d\mathbf{l}\) | Élément de longueur infinitésimal |
| \(\lambda\) | Longueur d’onde |
| \(M_T\), \(M_A\) | Grossissements transverse et angulaire |
| \(\mathbf{M}\) | Matrice ABCD d’un élément optique |
| \(\mu_\circ\) | Perméabilité du vide |
| \(n\) | Indice de réfraction, \(n\equiv\sqrt{\epsilon_r}\) |
| \(n_i,n_t\) | Indices incident et transmis |
| \(n_1,n_2\) | Indices avant (1) et après (2) un objet |
| \(N_1,N_2\) | Points nodaux d’une lentille |
| \(\eta_\circ\) | Impédance du vide, \(\sqrt{\epsilon_\circ/\mu_\circ}\) |
| \(PN_1,PN_2\) | Plans nodaux d’une lentille |
| \(PP_1,PP_2\) | Plans principaux d’une lentille |
| \(\hat{p}\), \(\hat{s}\) | Polarisations \(\parallel\) et \(\perp\) au plan d’incidence |
| \(\theta_i,\theta_r,\theta_t\) | Angles d’incidence, réflexion, transmission |
| \(\theta_B\), \(\theta_c\) | Angles de Brewster et critique |
| \(\mathbf{r}\) | Position 3D / “rayon’’ matriciel |
| \(R_1,R_2\) | Rayons de courbure d’interfaces |
| \(r_s,r_p\) | Coeff. Fresnel en réflexion (\(\hat{s}\), \(\hat{p}\)) |
| \(\rho(\mathbf{r},t)\) | Densité de charges électriques |
| \(\hat{\rho},\hat{\phi}\) | Vecteurs transverses cylindriques |
| \(t\) | Temps |
| \(t_s,t_p\) | Coeff. Fresnel en transmission (\(\hat{s}\), \(\hat{p}\)) |
| \(v\) | Vitesse de la lumière dans un milieu |
| \(\omega\) | Fréquence radiale \(2\pi f\) (rad/s) |
| \(\hat{x},\hat{y},\hat{z}\) | Vecteurs unitaires cartésiens |
| Symbole | Valeur |
|---|---|
| \(c\) | \(3 \times 10^{8}\) m/s |
| \(\epsilon_\circ\) | \(8.85 \times 10^{-12}\) F/m |
| \(\eta_\circ\) | \(377\ \Omega\) |
| \(\hslash\) | \(1.05 \times 10^{-34}\) J\(\cdot\)s |
| \(h\) | \(6.63 \times 10^{-34}\) J\(\cdot\)s |
Un glossaire est disponible de façon interactive pour les mots importants: dans la version interactive, il suffit de taper ou cliquer sur les mots pour obtenir la définition. La définition tente d’être brève et complète, elle donne aussi les unités métriques (SI) lorsqu’utile.
La notation complexe pour les champs électriques est très utile car elle simplifie grandement les traitements mathématiques. En effet, il est beaucoup plus simple d’intégrer, dériver, additionner des exponentielles complexes que des fonctions trigonométriques. Ainsi, il a rapidement été noté qu’une simple opération mathématique linéaire permet de travailler en nombre complexe et d’uniquement retourner en représentation réelle lorsque nécessaire. Cependant, plusieurs auteurs définissent cette relation différemment et il existe probablement autant de conventions qu’il y a d’auteurs. La différence n’est pas conceptuellement importante, mais lors de calculs où nous nous intéressons à la valeur absolue, la valeur exacte obtenue pour le champ électrique au laboratoire peut être très différente selon la convention utilisée. On rencontre les définitions suivantes (qui ne sont pas équivalentes sauf la première et la dernière):
\[\tilde{\mathbf{E}}(\mathbf{r},t) = \text{Re}{\mathbf{E}(\mathbf{r},t)}\] \[\tilde{\mathbf{E}}(\mathbf{r},t) = \mathbf{E}(\mathbf{r},t) + \mathbf{E}^*(\mathbf{r},t)\] \[\tilde{\mathbf{E}}(\mathbf{r},t) = \frac{1}{2}(\mathbf{E}(\mathbf{r},t) + \mathbf{E}^*(\mathbf{r},t))\]
En optique géométrique, il existe plusieurs conventions de signes pour les variables de distance et de rayons de courbure. La convention utilisée est celle de Hecht, qui est différente de celle utilisée en conception optique par exemple. Elle est décrite dans le Tableau 2.1.
Il arrive que des fonctions de plusieurs variables ont aussi plusieurs paramètres et que ces paramètres sont différentiateurs. Par exemple, on peut avoir deux ondes planes à deux fréquences différentes. La notation suivante pour une fonction \(f(x)\) avec les paramètres \(a, b\) peut s’écrire: \[f (x; a, b)\]
Vous remarquerez parfois le signe \(=\), qui se lit “est égal à”, et parfois le signe \(\equiv\), qui se lit “est défini par”. Le signe \(\equiv\) donne la définition d’un symbole. C’est différent d’une égalité, où deux paramètres sont égaux. Par exemple, la fréquence et la vitesse de la lumière dans le milieu définissent le vecteur d’onde, avec \(k \equiv \frac{\omega n}{c}\). Un autre exemple est l’indice de réfraction qui est défini par la racine carrée de la permittivité relative \(n \equiv \sqrt{\epsilon_r}\).
Il y a plusieurs livres de référence associés au cours PHY-2004/GPH-2004.
Ce livre est un classique des cours d’optique avec des bonnes explications physiques pour plusieurs phénomènes. Il couvre tous les phénomènes et donne beaucoup de détails sur la photographie et l’astronomie, mais ne discute pas de l’imagerie de façon plus générale (i.e. microscopie). Le formalisme de base des ray matrices (ou matrices ABCD) n’est malheureusement pas défini selon la notation standard.
Ce livre explique très bien les concepts, utilise un formalisme clair, et rassemble bien les équations importantes. Les exercices sont utiles pour mieux comprendre la matière et sont de niveaux appropriés. Les explications sont claires sans pour autant laisser de côté la rigueur lors des discussions.

Ce livre moderne explique bien les concepts de base et utilise des développements mathématiques appropriés. Il est de bon niveau pour comprendre plusieurs concepts de base, en particulier les aberrations optiques.
Ce livre contient un traitement mathématique de tous les concepts d’imagerie de façon très formelle et très rigoureuse, mais tout de même accessible pour un étudiant gradué. Il permet de bien comprendre les fondements de l’optique de Fourier dans le contexte de la microscopie optique.
Ce livre est la référence pour tout ce qui touche la microscopie optique utilisée en biologie. Il consiste en une collection de chapitres qui discutent d’un aspect particulier de la microscopie, allant de la résolution à l’imagerie du vivant, en passant par la détection des photons et la sélection des protéines fluorescentes.
Le livre est une référence exceptionnelle pour les lasers, et est extrêmement complet dans son traitement de l’optique de base, la propagation des faisceaux gaussiens, les impulsions, les matrices ABCD.
Pendant le cours et à l’intérieur des règles de droit d’auteur telles que décrites par l’Université Laval, nous utiliserons des extraits des différents livres, mais il est toutefois recommandé d’obtenir le livre “Fundamentals of Photonics” pour son style concis, sa clarté et la justesse de son propos.
Expliquer la signification des termes dans les équations de Maxwell ;
Savoir dériver et utiliser l’équation d’onde de Helmholtz ;
Expliquer et utiliser les bases complètes (sphériques, planes et autres) représentant les ondes dans les matériaux et dans le vide ;
Expliquer le concept, savoir utiliser et identifier un front d’onde et un rayon ;
Interpréter, savoir calculer et utiliser le vecteur de Poynting.
Hecht: début de la Section 5.2 ;
Saleh & Teich: Section 1.1, Sections 2.1 et 2.2.
Ce chapitre sert à rassembler les définitions essentielles au traitement de l’optique pour le reste de ce livre. Il ne s’agit pas d’un traitement complet mais bien d’une collection de définitions importantes.
Les équations de Maxwell permettent de calculer les champs électriques \(\mathbf{E}\left(\mathbf{r},t\right) \equiv \mathbf{E}\) et magnétiques \(\mathbf{H}\left(\mathbf{r},t\right) \equiv \mathbf{H}\) en tout point: \[\begin{eqnarray} \nabla \times \mathbf{E} & = & - \frac{\partial \mathbf{B}}{\partial t}, \label{eq:maxwell_curlE}\\ \nabla \times \mathbf{H} & = & \mathbf{J} + \frac{\partial \mathbf{D}}{\partial t}, \label{eq:maxwell_curlH} \\ \nabla \cdot \mathbf{B} & = & 0, \label{eq:maxwell_divB}\\ \nabla \cdot \mathbf{D} & = & \rho, \label{eq:maxwell_divD} \end{eqnarray}\] avec \(\rho\) la densité de charges libres et les définitions de la densité de flux magnétique \(\mathbf{B}=\mu \mathbf{H}\), et la densité de flux électrique \(\mathbf{D} \equiv \epsilon_\circ \mathbf{E}+\mathbf{P}\), où la densité de polarisation \(\mathbf{P}\) (ou densité de dipôles), c’est-à-dire la réponse du milieu lors de l’action d’un champ électrique, dépend de l’orientation du champ électrique, de sa fréquence d’oscillation, et des propriétés du matériau. Le lien entre \(\mathbf{P}\) et le champ électrique appliqué \(\mathbf{E}\) est donné en général par la relation suivante: \[\begin{equation} \mathbf{P} = {\epsilon_o}\chi \cdot \mathbf{E} + {\epsilon_o}\chi^2 : \mathbf{E} \mathbf{E}+... , \label{eq:polarisation-generale} \end{equation}\]
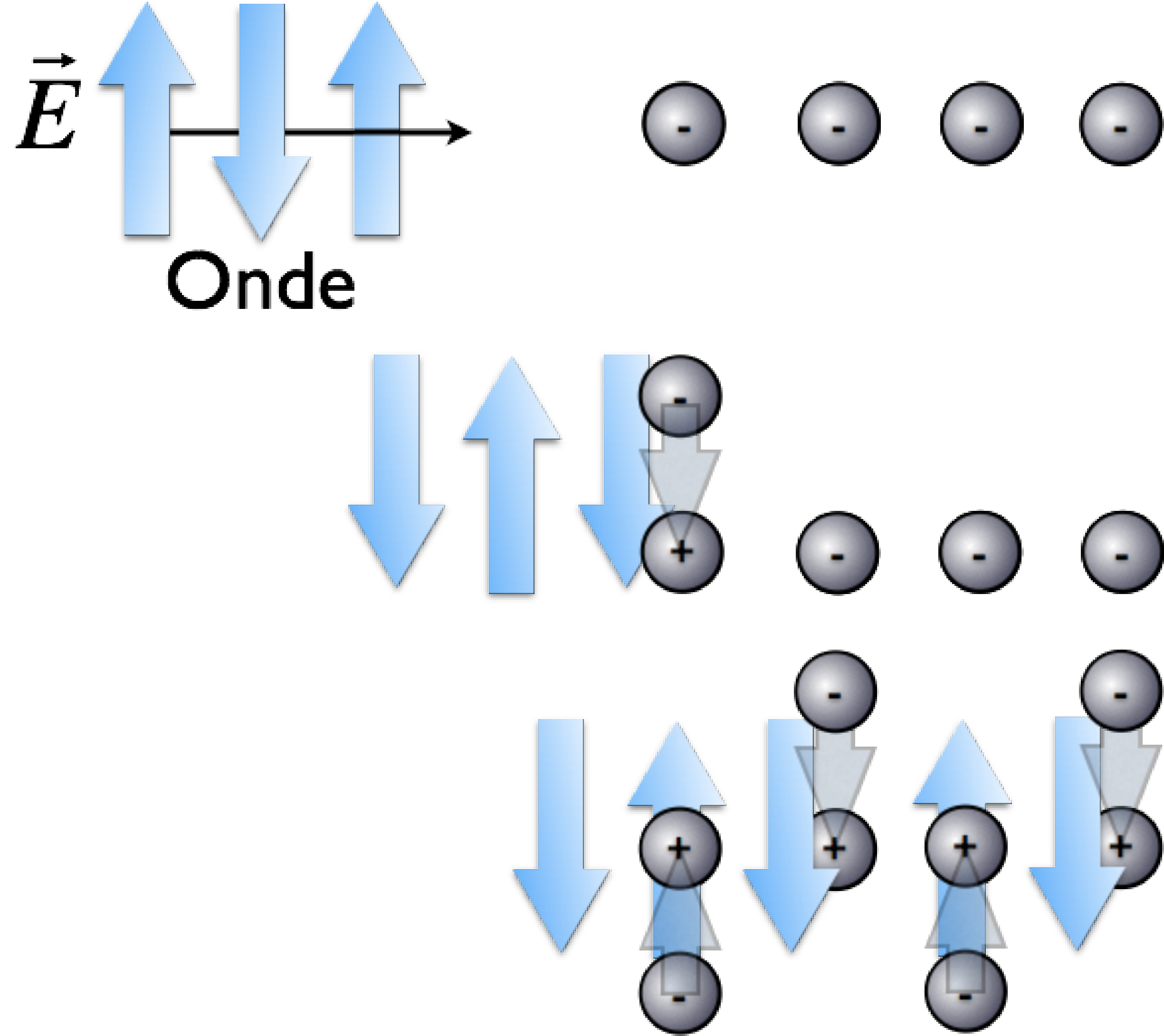
où \(\chi\) et \(\chi^2\) sont les susceptibilités linéaire et non-linéaire de deuxième ordre respectivement et dépendent de la ou des fréquences du champ électrique. Dans cette formulation de l’Éq. \(\eqref{eq:polarisation-generale}\) , la susceptibilité est un tenseur et les opérateurs \(\cdot\) et sont les produits scalaires des tenseurs avec les vecteurs de champs électriques. Dans le cadre qui nous intéresse (l’optique linéaire) et dans le cas des milieux homogènes (identiques en tout point) et isotropes (non biréfringents, c’est-à-dire identiques dans toutes les directions), nous nous intéressons seulement aux champs électriques faibles et considérons \(\mathbf{E}\) comme un scalaire, ce qui fait que nous pouvons écrire: \[\begin{equation} \mathbf{P} = {\epsilon_o}\chi \mathbf{E}. \label{eq:polarisation-lineaire} \end{equation}\] L’induction électrique dans ce cas particulier est donc donnée par: \[\begin{equation} \mathbf{D} = {\epsilon_o}\left({1+\chi}\right)\cdot \mathbf{E} = {\epsilon_o}\epsilon_r\mathbf{E} \equiv \epsilon \mathbf{E} . \label{eq:induction-electrique} \end{equation}\] Après quelques manipulations des Équations \(\eqref{eq:maxwell_curlE}\) , \(\eqref{eq:maxwell_curlH}\) , \(\eqref{eq:maxwell_divB}\) et \(\eqref{eq:maxwell_divD}\) , en supposant des milieux sans sources et sans charges libres (\(\rho = 0,\ \mathbf{J}=0\)), et avec les conditions de matériaux isotropes et de champs simples menant à l’Éq. \(\eqref{eq:induction-electrique}\) , on peut obtenir l’équation d’onde dans un milieu homogène: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}}{\partial t^2} = 0 .\label{eq:equation-donde-espace-temps} \end{equation}\] Par séparation de variables \(\mathbf{E}(\mathbf{r},t)\equiv\mathbf{A}(\mathbf{r})\mathbf{T}(t)\), on peut l’écrire sous la forme de l’équation de Helmholtz indépendante du temps en 3D: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{A} + k^2 \mathbf{A} = 0, \end{equation}\] avec: \[\begin{equation} k \equiv \frac{\omega n}{c} , \end{equation}\] \[\begin{equation} c \equiv \frac{1}{\sqrt{\mu_\circ \epsilon_\circ}} , \end{equation}\] \[\begin{equation} n \equiv \sqrt{\frac{\epsilon}{\epsilon_\circ}} \equiv \sqrt{\epsilon_r} , \label{eq:definition_indice_refraction} \end{equation}\] \[\begin{equation} \epsilon_r = 1 + \chi , \end{equation}\] avec \(n\) l’indice de réfraction du milieu. Physiquement, on peut voir une illustration à la Fig. 1.1 qui montre que les dipôles s’opposent au passage du champ électrique de l’onde.
Pour obtenir la réponse du matériau de façon moins générique que l’Éq. \(\eqref{eq:polarisation-generale}\) ou \(\eqref{eq:polarisation-lineaire}\) , on doit obtenir, à l’aide d’un modèle, la réponse des dipôles sous l’action d’un champ électrique. On utilise ici un modèle classique d’un électron lié qui subit la force de rappel d’un noyau positif. La densité de polarisation (dipôles) est définie comme: \[\begin{equation} \mathbf{P}\equiv \sum_i q_i \mathbf{d}_i , \end{equation}\] et réagit au champ appliqué en s’opposant à celui-ci. La densité de polarisation pour une petite région localisée de l’espace est donc donnée par: \[\begin{equation} \mathbf{P} = - N e \mathbf{d}, \label{eq:densite-polarisation-localise} \end{equation}\] avec \(\mathbf{d}\) le déplacement moyen des \(N\) électrons de charge \(e\). À l’aide d’un modèle simple d’un électron sous l’effet d’un champ électrique \(\mathbf{E}_\circ e^{-i\omega t}\) oscillant à une fréquence \(\omega\), avec une force de rappel \(-K \mathbf{d}\) et avec une force de friction \(m \gamma v\), on peut écrire: \[\begin{equation} m \frac{d^2 \mathbf{d} }{dt^2} + m \gamma \frac{d \mathbf{d} }{dt} + K \mathbf{d} = -e \mathbf{E}_\circ. \end{equation}\] qui est un électron qui subit l’action d’un champ électrique uniforme pour ainsi obtenir \(\mathbf{d}\) et la polarisation \(\mathbf{P}\) par l’Éq. \(\eqref{eq:densite-polarisation-localise}\) : \[\begin{equation} \mathbf{P} = \frac{Ne^2/m}{\omega_\circ^2 - \omega^2 - i \omega \gamma} \mathbf{E}_\circ, \label{eq:polarisation-drude-model} \end{equation}\] avec \(\omega_\circ \equiv \sqrt{K/m}\). D’autres modèles, plus ou moins complexes, permettent d’obtenir des relations plus complètes. \(\blacksquare\)
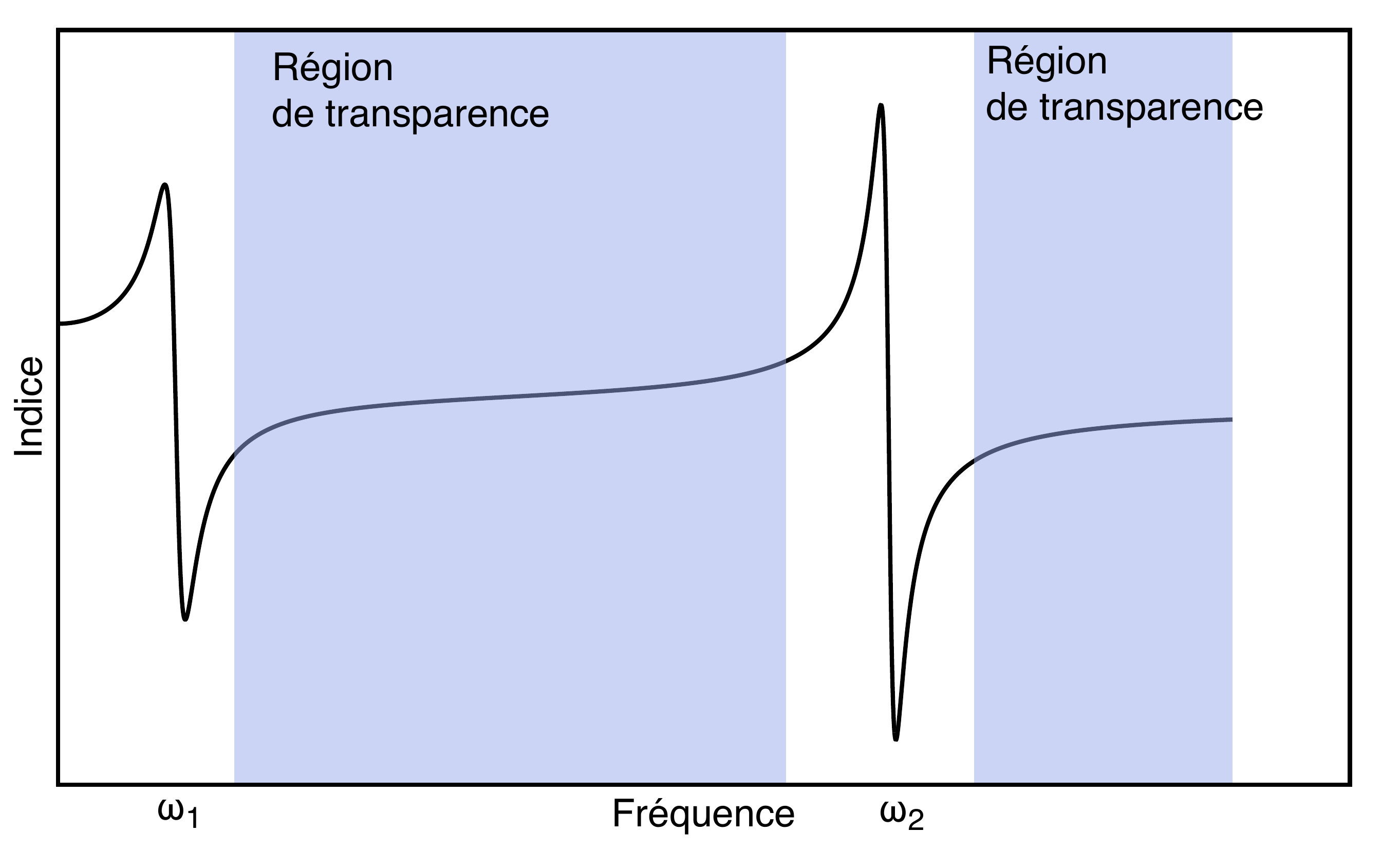
En remplaçant l’Éq. \(\eqref{eq:polarisation-drude-model}\) pour dériver les équations d’onde, on obtient: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ \epsilon_\circ \left( 1+ \frac{Ne^2}{m\epsilon_\circ} \frac{1}{\omega_\circ^2 -\omega^2 - i \omega \gamma} \right) \frac{\partial^2 \mathbf{E}}{\partial t^2} = 0 \label{eq:derivation_equation_onde} \end{equation}\] On identifie directement la permittivité complexe: \[\begin{equation} \epsilon = \left[ 1+ \frac{Ne^2}{\epsilon_\circ m} \left( \frac{1}{\omega_\circ^2 -\omega^2 - i \omega \gamma} \right) \right]. \end{equation}\] En utilisant \(\epsilon \equiv \epsilon'+i\epsilon''\), on peut écrire: \[\begin{equation} \epsilon'= \left[ 1+ \frac{Ne^2}{\epsilon_\circ m} \left( \frac{\omega_\circ^2 -\omega^2}{(\omega_\circ^2 -\omega^2)^2 + \omega^2 \gamma^2} \right) \right], \end{equation}\] \[\begin{equation} \epsilon''= \left[ \frac{Ne^2}{\epsilon_\circ m} \left( \frac{\omega^2 \gamma^2}{(\omega_\circ^2 -\omega^2)^2 + \omega^2 \gamma^2} \right) \right]. \end{equation}\] \(\blacksquare\)
Puisque la réponse n’est pas instantanée et que le blocage du champ n’est pas complet, l’induction électrique résultante \(\mathbf{D} \equiv {\epsilon_o}\mathbf{E} + \mathbf{P}\) est plus faible que le champ original et voit un délai (ou phase) s’ajouter par rapport au champ original. Mais au-delà des généralités, quelle est la forme de la réponse de \(\mathbf{P}\) en fonction de l’application d’un champ électrique \(\mathbf{E}\)? La réponse \(\chi\) d’un milieu dépend de la nature de celui-ci et une modélisation de la réponse des électrons nous donne la courbe de l’indice de réfraction en fonction de la fréquence d’excitation. Un exemple de modèle est donné à l’Exemple 1 , ce qui permet d’obtenir la permittivité à l’Exemple 2 et l’allure de la courbe de l’indice de réfraction est illustrée à la Fig. 1.2 .
Cette équation d’onde \(\eqref{eq:equation-donde-espace-temps}\) possède une infinité de solutions, dont deux sont particulièrement utiles:
L’onde plane monochromatique: \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right) } . \end{equation}\]
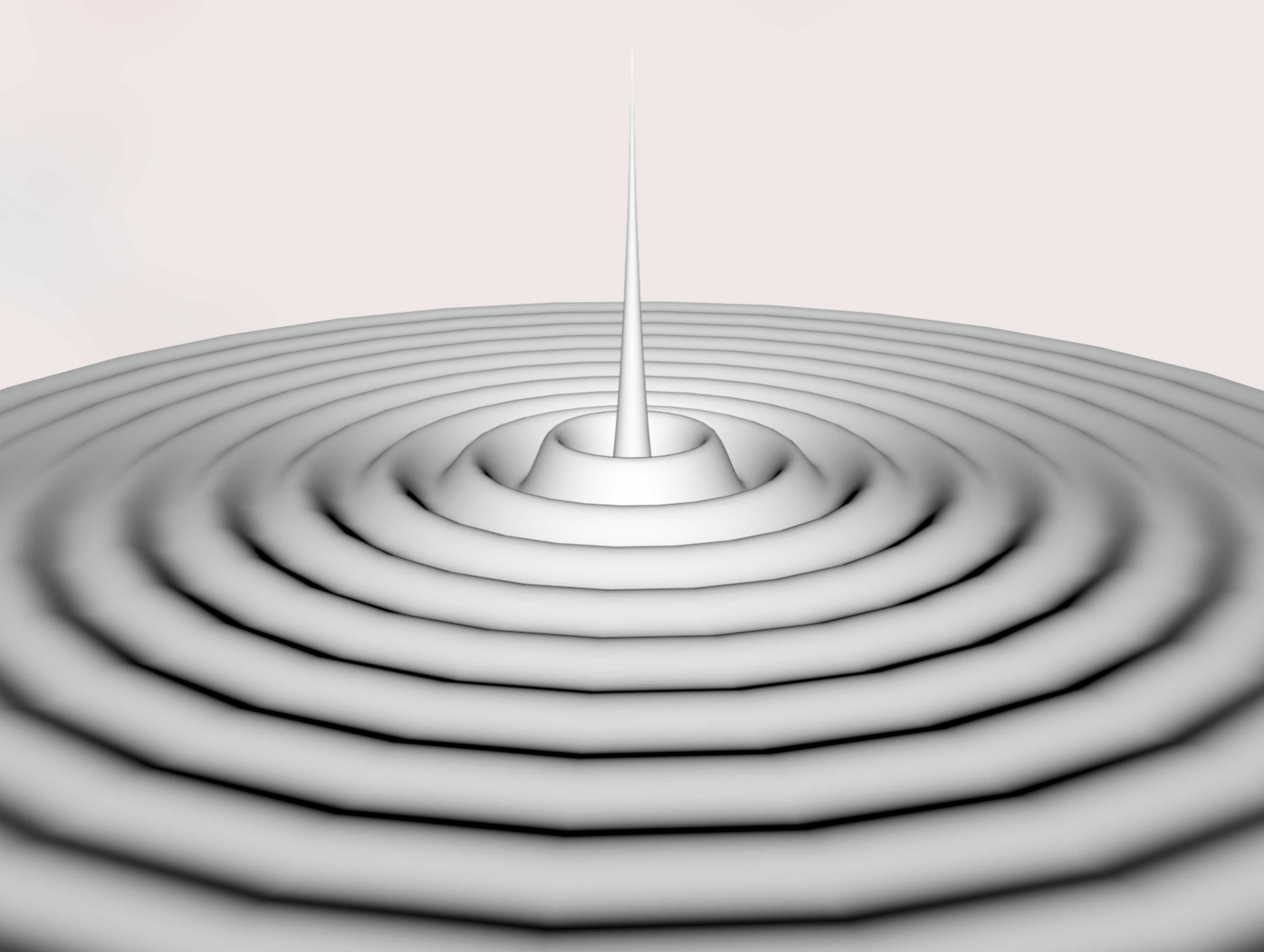
L’onde sphérique monochromatique: \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) =\mathbf{E}_\circ \frac{ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right) }}{\left|r\right|} . \end{equation}\]
Dans les deux cas, nous avons:
La fréquence angulaire \(\omega\) est une constante et est une donnée du problème.
Le vecteur d’onde est défini par la fréquence et l’indice de réfraction, \(k \equiv \frac{\omega n}{c}\). Dit autrement, la fréquence d’oscillation donne la longueur d’onde, et non l’inverse.
On note:
L’onde plane monochromatique a un seul vecteur d’onde \(\mathbf{k}\) et une seule fréquence \(\omega\).
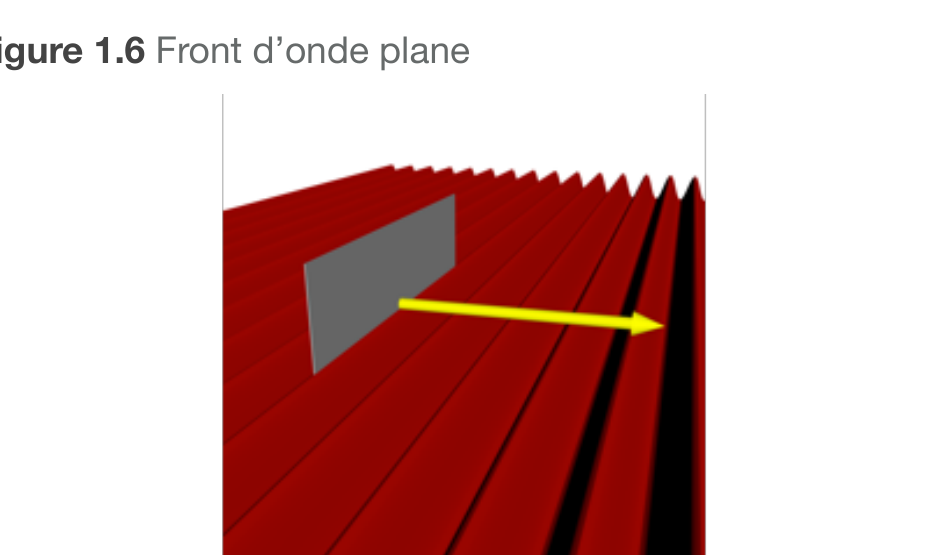
L’onde plane est une construction mathématique et ne représente pas une onde réelle. L’onde plane possède une énergie infinie par exemple.
L’onde plane est infinie dans l’espace et dans le temps. Elle n’a pas de début ni de fin. Cependant, une somme d’ondes planes peut donner une onde résultante finie et localisée dans l’espace.
L’onde sphérique monochromatique possède plusieurs vecteurs d’onde \(\mathbf{k}\) et une seule fréquence \(\omega\).
L’onde sphérique représente une onde physique.
On peut représenter n’importe quelle onde complexe par une somme d’ondes planes ou une somme d’ondes sphériques de vecteur d’onde \(\mathbf{k}\) différents : elles sont toutes deux des bases complètes.
Il existe plusieurs autres bases complètes qui peuvent représenter n’importe quelle onde complexe. Cependant, les ondes planes et sphériques sont particulièrement utiles de par leur simplicité.
Ainsi, il est possible de représenter toute onde monochromatique par une somme d’ondes planes de différents vecteurs d’onde \(\mathbf{k}\) d’amplitude \(\mathbf{E}_\circ \left( \mathbf{k} \right)\) : \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \int_\mathbf{k} \mathbf{E}_\circ \left( \mathbf{k}\right) e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right) } d\mathbf{k}, \end{equation}\] ou encore n’importe quelle impulsion par une somme d’ondes planes de différents vecteurs d’onde \(\mathbf{k}\) et de différentes fréquences angulaires \(\omega\), chacune d’amplitude \(\mathbf{E}_\circ \left( \mathbf{k}, \omega \right)\) : \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \int_\omega \int_\mathbf{k} \mathbf{E}_\circ \left( \mathbf{k}, \omega \right) e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right) }\ d\mathbf{k}\ d\omega. \end{equation}\]
Une quantité physique importante est l’irradiance ou le vecteur de Poynting. Le vecteur de Poynting définit le flux d’énergie instantané par unité de surface par unité de temps en un point d’une onde et pointe dans la direction du flux d’énergie: \[\begin{equation} \mathbf{S} = \mathbf{E} \times \mathbf{H}\quad [\text{W}/\text{cm}^2]. \end{equation}\] Le flux instantané oscille donc rapidement à chaque cycle. Pour le cas particulier d’une onde monochromatique comme défini à l’Éq. \(\eqref{eq:derivation_equation_onde}\) , on utilise la moyenne sur un cycle et on obtient: \[\begin{equation} \left< \mathbf{S} \right> = \frac{c \epsilon_\circ}{2} \left|\mathbf{E}_\circ\right|^2 \quad [W/\text{cm}^2]. \end{equation}\] On fait la conversion d’énergie à photon en utilisant la définition de l’énergie d’un photon: \[\begin{equation} E = \frac{h}{2 \pi} \omega \quad \left[\text{J}\right], \end{equation}\] où \(h\) est la constante de Planck et \(\omega\) la fréquence radiale de l’onde.
| Source | Flux moyen de photons |
| [photons/s/m\(^2\)] | |
| Laser (focalisé) | \(10^{26}\) |
| Laser | \(10^{21}\) |
| Soleil | \(10^{18}\) |
| Intérieur maison | \(10^{16}\) |
| Lune | \(10^{12}\) |
| Étoile (Véga) | \(10^{10}\) |
On peut définir la propagation d’une onde de deux façons équivalentes:
Par son front d'onde: l’onde se propage toujours en direction perpendiculaire à son front d’onde.
Par rayon: un rayon indique la direction perpendiculaire à un front d’onde. Pour les cas qui nous intéresseront, un rayon est donc un vecteur de Poynting en un endroit donné. Une définition plus formelle existe.
Ne pas confondre les termes anglais ray et radius: en français, il s’agit malheureusement du même mot (rayon et rayon de courbure).
Pour plus d’information, vous êtes dirigés vers les sources d’informations supplémentaires suivantes:
Discussion sur les équations de Maxwell
Ce site est particulièrement bien écrit pour ceux qui s’intéressent aux détails de l’interprétation des équations de Maxwell. Vous y trouverez une excellente discussion sur la densité de flux électrique \(\mathbf{D}\), de même que sa définition.
Définition du rayon: Une définition plus formelle du rayon est donnée dans le livre de Jérôme Mertz, “Introduction to Optical Microscopy”.
Expliquer l’origine de l’indice de réfraction et son impact sur les ondes ;
Définir et savoir utiliser la loi de la réflexion ;
Définir et savoir utiliser la loi de Snell pour la réfraction ;
Définir, identifier et utiliser les polarisations \(\hat{s}\) et \(\hat{p}\) ;
Savoir utiliser les coefficients de Fresnel pour les deux polarisations ;
Expliquer l’origine et calculer l’angle de Brewster.
Hecht: début de la Section 5.2
Saleh & Teich: Section 1.1, Sections 2.1 et 2.2
L’indice de réfraction donne la vitesse de la lumière dans un milieu: \[\begin{equation} v=\frac{c}{n} \label{eq:speedoflight} \end{equation}\]
L’indice de réfraction est défini à l’Éq. \(\eqref{eq:definition_indice_refraction}\) , comme \(n\equiv \sqrt{\epsilon_r}\). Cet indice de réfraction résulte de la réaction des dipôles du milieu qui s’opposent partiellement au champ électrique de l’onde qui se propage, comme discuté à la section Description Ondulatoire, en particulier à l’Exemple 1 . L’impact de l’indice de réfraction sur une onde est illustrée à la Figure 1.7 : si une onde se propage dans un milieu de dimension finie autre que l’air, le front d’onde sera déformé.
À une interface, un rayon faisant un angle d’incidence \(\theta_i\) avec la normale est réfléchi à un angle \(\theta_r\) : \[\begin{equation} \theta_r = - \theta_i \end{equation}\]
À une interface, un rayon faisant un angle \(\theta_i\) est transmis et réfracté à un angle \(\theta_t\) obtenu par : \[\begin{equation} n_i \sin \theta_i = n_t \sin \theta_t, \end{equation}\]
où \(n_i\) et \(n_t\) sont les indices de réfraction dans les milieux incident et transmis respectivement. Dans le cas où \(n_i>n_t\), il y aura réflexion totale interne à l’angle critique: \[\begin{equation} \theta_c = \arcsin \frac{n_t}{n_i} \end{equation}\]
Les lois de la réfraction et de Snell donnent les directions des rayons réfléchis et réfractés, mais les coefficients de Fresnel nous permettent de calculer l’amplitude de chacun. Il y a deux polarisations préférentielles lorsqu’un rayon est incident sur une surface (\(\hat{s}\) et \(\hat{p}\)), tel qu’illustré sur la Figure 1.8. Les coefficients de Fresnel sont dérivés à partir des conditions aux frontières pour les champs électriques et magnétiques: leurs composantes tangentielles sont continues.
Les champs électriques réfléchis et transmis selon les deux polarisations sont donnés par: \[\begin{align} E_{r,s} = r_s E_{i,s} \quad E_{r,p} = r_p E_{i,p} \nonumber \\ E_{t,s} = t_s E_{i,s} \quad E_{t,p} = t_p E_{i,p} , \end{align}\] avec \[\begin{eqnarray} r_s & = & \frac{n_i \cos \theta_i - n_t \cos \theta_t}{n_i \cos \theta_i + n_t \cos \theta_t}, \\ r_p & = & \frac{n_t \cos \theta_i - n_i \cos \theta_t}{n_i \cos \theta_t + n_t \cos \theta_i}, \\ t_s & = & \frac{2 n_i \cos \theta_i }{n_i \cos \theta_i + n_t \cos \theta_t}, \\ t_p & = & \frac{2 n_i \cos \theta_i }{n_i \cos \theta_t + n_t \cos \theta_i}. \end{eqnarray}\]
On remarque que le coefficient de réflexion \(r_p\) peut devenir zéro à l’angle de Brewster \(\theta_B\): \[\begin{equation} \theta_B = \arctan \frac{n_t}{n_i}, \end{equation}\] auquel cas il n’y a aucune réflexion de la surface. Il n’y a pas d’angle de Brewster à la polarisation \(\hat{s}\). Les différentes situations sont illustrées sur la Fig. 1.9 .
Pour plus d’information, vous êtes dirigés vers les sources d’informations supplémentaires suivantes:
Hecht, “Optics”, section 3.5, 4.2
La section 3.5 de Hecht discute en détail de l’origine de l’indice de réfraction de façon physique et dérive les expressions de base. La section 4.2 revient sur l’interprétation des ondes primaires et secondaires.
Indices de réfraction
Ce site est très riche en information sur toutes les caractéristiques de
l’indice de réfraction pour une très grande variété de
matériaux.
Hecht, “Optics”, section 4.6.1
Dérivation des coefficients de Fresnel avec les conditions aux frontières.

Faire le tracé de rayons pour les rayons importants et pour obtenir une image ;
Comprendre et expliquer l’origine de la formation de l’image dans des systèmes simples et complexes et savoir calculer la position de l’image ;
Expliquer la différence entre une image réelle et une image virtuelle ;
Comprendre, expliquer et savoir faire des calculs impliquant les phénomènes qui régissent l’optique géométrique ;
Savoir utiliser la loi de l’imagerie, la loi de Lensmaker.
L’optique géométrique c’est:
"L’ensemble des modèles qui traite de la modification des propriétés d’un faisceau de lumière à des fins d’imagerie, d’illumination, ou de collection dans des conditions où la longueur d’onde tend vers zéro. Il n’y a pas de diffraction et la lumière est traitée sous forme de rayons plutôt que de fronts d’onde."
La propagation d’un faisceau à travers des milieux d’indices différents modifiera la forme du front d’onde, comme illustré à la Figure 2.1. On peut démontrer qu’un milieu de forme ellipsoïde ou un hyperboloïde transformera un groupe de rayons provenant d’un point en un groupe de rayons convergeant vers un seul autre point de l’autre côté de la lentille. L’exemple le plus simple est la lentille-mince.
Pour une lentille mince convergente :
Un rayon parallèle à l’axe se dirigera vers le foyer \(F_2\)
Un rayon passant par le foyer \(F_1\) ressortira parallèle à l’axe.
Un rayon passant par le centre de la lentille ne sera pas dévié.
Pour une lentille mince divergente:
Un rayon parallèle à l’axe se propagera dans une direction selon laquelle il semble provenir du foyer \(F_1\) .
Un rayon se dirigeant vers le foyer \(F_2\) ressortira parallèle à l’axe.
Un rayon passant par le centre de la lentille ne sera pas dévié.
Ces définitions seront revues de façon plus formelle lors de l’introduction de concepts plus généraux d’imagerie avec les plans et points cardinaux. On peut cependant tracer les rayons cardinaux pour obtenir la position d’une image, tel qu’indiqué pour les lentilles minces convergentes à la Figure 2.2. Le groupe de rayons provenant d’un point objet à une distance \(d_o\) devant la lentille convergera vers un point à une distance \(d_i\) derrière la lentille.
On peut dériver l’ensemble des lois de l’imagerie à partir du cas d’un rayon qui frappe une interface courbe, comme illustré à la Figure 2.3. On obtient avec la loi de Snell et par géométrie:
\[\begin{equation} \frac{n_1}{d_o} + \frac{n_2}{d_i} = \frac{n_2-n_1}{R}. \end{equation}\]
Pour une lentille mince de distance focale \(f\), la loi de l’imagerie s’énonce: \[\begin{equation} \frac{1}{d_o} + \frac{1}{d_i} = \frac{1}{f} , \end{equation}\] avec \(d_o\) la distance entre l’objet et la surface de la lentille, et \(d_i\) la distance entre l’image et la surface de la lentille, comme illustré à la Figure 2.4. La convention de signe est décrite au tableau Table 2.1.
| Symbole | Convention |
|---|---|
| \(d_0, d_i\) | Distance positive pour objet et image réels. |
| \(f\) | |
| négatif lorsque divergente. | |
| \(R\) | |
| convergente, négatif lorsque concave. |
Le grossissement transverse \(M_T\) (de magnification en anglais) est défini par: \[\begin{equation} M_T \equiv -\frac{d_i}{d_o}. \label{eq:grossissement_transverse} \end{equation}\]
Le grossissement angulaire \(M_A\) est donné par: \[\begin{equation} M_A = \frac{1}{M_T} . \end{equation}\]
On obtient la distance focale \(f\) pour une lentille épaisse composée de deux interfaces de rayons de courbures \(R_1\) et \(R_2\), d’indice de réfraction \(n\), d’épaisseur \(d\) dans l’air avec: \[\begin{equation} \frac{1}{f} \equiv \left( n - 1 \right) \left( \frac{1}{R_1} - \frac{1}{R_2} + \frac{\left(n-1 \right)d}{nR_1R_2} \right). \end{equation}\]
Pour une lentille mince (\(d=0\)), on obtient: \[\begin{equation} \frac{1}{f} \equiv \left( n - 1 \right) \left( \frac{1}{R_1} - \frac{1}{R_2}\right). \end{equation}\]
De façon formelle et générale, on définit:
Un rayon incident parallèle à l’axe d’un côté de la lentille passera par le point focal de l’autre côté de la lentille, et un rayon incident qui passe par le point focal d’un côté émergera parallèle à l’axe de l’autre côté de la lentille. De façon plus générale, un rayon incident à un angle donné au plan focal convergera à une hauteur (proportionnelle à l’angle incident) à l’autre plan focal. La distance focale est la distance entre le point focal et le plan principal d’entrée ou de sortie. Notez que les deux plans focaux ne sont pas des plans conjugués (image l’un de l’autre). On dit plutôt que ce sont des plans de Fourier l’un de l’autre, ce que nous verrons plus loin au Chapitre sur l’optique de Fourier
Les plans principaux sont les deux plans conjugués où est concentré tout l’effet optique de courbure d’une lentille, c’est-à-dire qu’un rayon à un plan principal apparait à l’autre plan principal à la même hauteur mais à une orientation différente. Ainsi, les deux plans principaux sont des plans conjugués de grossissement transverse \(M_T=1\). Notez que la distance focale est définie par rapport au plan principal, non pas par rapport à la surface physique de la lentille.
Les plans nodaux sont les deux plans conjugués où un cône de rayons couvrant un angle \(\Delta \theta\) sera transféré du plan nodal d’entrée au plan nodal de sortie sans aucun grossissement de ce cône, qui couvrira encore un angle \(\Delta \theta\). Ainsi, les deux plans nodaux sont des plans conjugués de grossissement angulaire \(M_A=1\). Dans le cas particulier d’un rayon qui croise le plan nodal sur l’axe optique, ce rayon n’est pas dévié du tout. Ceci est illustré à la Figure 2.6.
Dans le cas d’un système optique dans l’air (où l’indice à l’entrée et à la sortie est le même), les plans principaux et les plans nodaux coïncident.
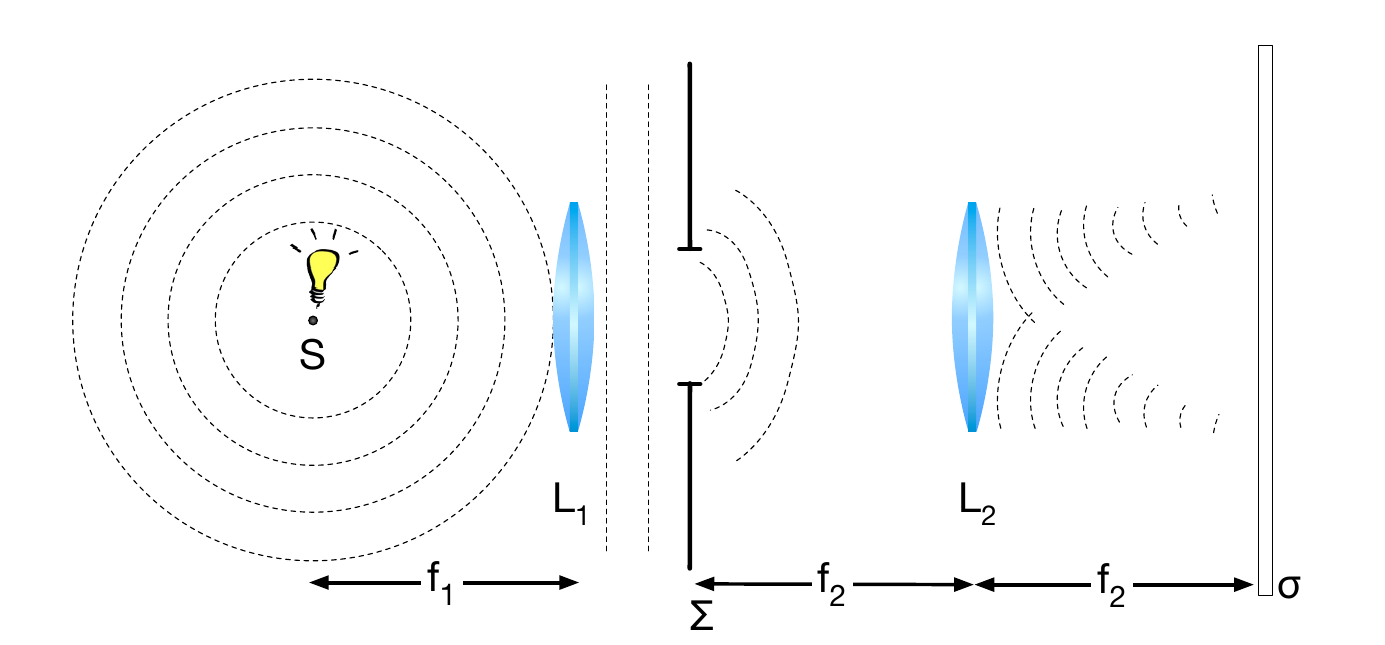
En utilisant les lois de l’imagerie, on peut faire un système qui consiste en deux lentilles séparées par la somme de leurs distances focales. Lorsque l’objet est positionné au foyer (\(d_{o,1} \rightarrow f_1^+\)) de la première lentille, l’image due à la première lentille est à l’infini (\(d_{i,1}\rightarrow+\infty\)). Cette image devient un objet virtuel à l’infini (\(d_{o,2} \rightarrow -\infty\)) pour la deuxième lentille et forme donc une image au foyer de cette deuxième lentille (\(d_{i,2} = f_2\)). Ainsi, l’image apparaît au foyer de la deuxième lentille et ce système est appelé un système 4f (Figure 2.7).
Le grossissement pour un système 4f composé de lentilles de distances focales \(f_1, f_2\) est obtenu en faisant le grossissement de la première lentille et ensuite celui de la deuxième lentille (voir l’Éq. \(\eqref{eq:grossissement_transverse}\) ), ce qui donne: \[\begin{equation} M_T = \frac{d_{i,1}}{d_{o,1}} \times \frac{d_{i,2}}{d_{o,2}} = \frac{d_{i,1}}{d_{o,1}} \times \frac{d_{i,2}}{-d_{i,1}} = -\frac{f_2}{f_1}. \end{equation}\]
Hecht, “Optics”, Section 5.2
Démonstration de la forme idéale d’une lentille, obtention des équations pour la lentille mince.
Définir et savoir utiliser les matrices représentant les différentes composantes simples pour transformer les rayons ;
Décrire et savoir utiliser le formalisme des matrices ABCD ;
Comprendre et savoir comment obtenir la condition d’imagerie, les plans principaux et les points nodaux d’un système complexe ;
Identifier la distance focale équivalente d’un système complexe ;
Calculer la position d’une image avec le formalisme matriciel ;
Résoudre des problèmes en utilisant le formalisme matriciel.
Le formalisme matriciel ABCD (ou ray matrices en anglais) permet de transformer un rayon (vecteur colonne) d’un plan de référence à un autre à travers différents éléments optiques (représentés par des matrices). On définit un rayon : \[\begin{equation} \mathbf{r} \equiv \Biggl[ \begin{matrix} y \\ \theta \\ \end{matrix} \Biggr] , \end{equation}\] avec \(y\) la distance à l’axe optique et \(\theta\) l’angle que fait ce rayon avec l’axe optique du système. L’axe optique d’un système optique est défini comme la ligne imaginaire qui passe par le centre des éléments. Notez qu’il existe d’autres définitions du rayon par certains auteurs, mais celles-ci ne sont pas retenues ici. Un ensemble de matrices \(2 \times 2\) sert à représenter les transformations que font subir les éléments optiques à un rayon. Cette matrice est représentée par: \[\begin{equation} \mathbf{M} = \Biggl[ \begin{matrix} A & B \\ C & D \end{matrix} \Biggr]. \end{equation}\] Un rayon qui traverse dans l’ordre les éléments \(\mathbf{M}_1,\mathbf{M}_2,\mathbf{M}_3, ... \mathbf{M}_i\) sera transformé en \(\mathbf{r}^\prime\) par l’application séquentielle par la gauche des matrices représentant les éléments (notez l’ordre de la multiplication!):
\[\begin{equation} \mathbf{r}^\prime = \mathbf{M}_i,...\mathbf{M}_3,\mathbf{M}_2 \mathbf{M}_1 \mathbf{r}. \end{equation}\] De façon générale, un rayon est donc transformé par: \[\begin{equation} y^\prime = A y + B \theta , \end{equation}\] \[\begin{equation} \theta^\prime = C y + D \theta. \end{equation}\]
Le déterminant des matrices peut être montré comme étant: \[\begin{equation} \label{eq:det_matrice_ABCD} \text{det}\ \mathbf{M} = AD-BC=\frac{n_1}{n_2} , \end{equation}\]
où \(n_1\) est l’indice de réfraction au plan d’entrée et \(n_2\) au plan de sortie. Si les indices sont identiques (souvent le cas, par exemple avec un système optique dans l’air), on aura \(\text{det}\ \mathbf{M} = 1\).
Les matrices les plus importantes sont définies dans la Table 2.2. Notez que l’espace libre et l’interface diélectrique courbe permettent de redériver les matrices pour l’interface plane et la lentille mince.
| Matrice | Description | |
|---|---|---|
| \(\bigl[\begin{smallmatrix} 1 & d \\ 0 & 1 \end{smallmatrix}\bigr]\) | Espace libre | |
| \(\bigl[\begin{smallmatrix} 1 & 0 \\ 0 & n_1/n_2 \end{smallmatrix}\bigr]\) | Interface plane entre \(n_1\) et \(n_2\) | |
| \(\bigl[\begin{smallmatrix} 1 & d/n \\ 0 &1 \end{smallmatrix}\bigr]\) | Bloc diélectrique d’indice \(n\) dans l’air | |
| \(\bigl[\begin{smallmatrix} 1 & 0 \\ -(n_2-n_1)/(n_2 R) & n_1/n_2 \end{smallmatrix}\bigr]\) | Interface courbe \(R\), \(R>0\): convexe | |
| \(\bigl[\begin{smallmatrix} 1 & 0 \\ -1/f & 1 \end{smallmatrix}\bigr]\) | Lentille mince, focale \(f\) | |
| \(\bigl[\begin{smallmatrix} 1 & 0 \\ -2/R & 1 \end{smallmatrix}\bigr]\) | Miroir, rayon \(R\), \(R>0\): concave | |
| \(\bigl[\begin{smallmatrix} \cos \left( \alpha d \right) & \alpha^{-1}\sin \left( \alpha d \right) \\ -\alpha\sin \left( \alpha d \right) & \cos \left( \alpha d \right) \end{smallmatrix}\bigr]\) | GRIN, \(n(y)=n_\circ^2(1-\alpha^2 y^2)\) |
Tout système optique peut être représenté par une matrice ABCD. Cette matrice aura comme propriété que son déterminant est donné par l’Éq. \(\eqref{eq:det_matrice_ABCD}\) . Pour identifier différents plans d’intérêt pour un système arbitraire représenté par une matrice \(\mathbf{M}\), on peut multiplier par une matrice de déplacement devant et derrière et solutionner pour une condition donnée. Cette stratégie sera utilisée ci-dessous pour trouver la matrice d’un système imageant, pour trouver les plans principaux ou encore les plans nodaux.
Le système est dit imageant lorsque la matrice représente la transformation complète entre un plan objet et un plan image, c’est-à-dire entre deux plans conjugués. On peut facilement trouver les plans conjugués en appréciant que si deux plans sont conjugués (objet-image), tous les rayons provenant d’une hauteur \(y\) sur l’objet convergeront vers un même point \(y^\prime\) pour toute orientation \(\theta\) (voir Figure 2.8). Ainsi, on doit rechercher la condition qui donnera \(y^\prime = A y\), donc \(B = 0\). Cette condition s’appelle la condition d’imagerie.
En condition d’imagerie (\(B=0\)), définit le grossissement transverse car on a donc: \[\begin{equation} M_T \equiv A \text{ lorsque } B = 0. \end{equation}\]
Le grossissement transverse n’est pas une quantité définie si la matrice ne représente pas un système imageant.
De la même façon, on définit le grossissement angulaire avec : \[\begin{equation} \theta^\prime = C y + D \theta , \end{equation}\] \[\begin{equation} M_A \equiv D \text{ lorsque } B = 0 , \end{equation}\]
Le grossissement angulaire n’est pas une quantité définie si la matrice ne représente pas un système imageant.
En condition d’imagerie (\(\mathbf{B} = 0\)), on voit que le déterminant de l’Éq. \(\eqref{eq:det_matrice_ABCD}\) de la matrice nous donne la relation: \[\begin{equation} M_T M_A = \frac{n_1}{n_2}. \end{equation}\]
La matrice suivante permet de propager un rayon d’une distance \(L_1\) jusqu’à un système arbitraire ABCD, ensuite d’une distance \(L_2\): \[\begin{align} \Biggl[ \begin{matrix} 1 & L_2 \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} A & B \\ C & D \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & L_1 \\ 0 & 1 \end{matrix} \Biggr] &= \\ \Biggl[ \begin{matrix} A + C L_2 & B + D L_2 + L_1 (A + C L_2) \\ C & D + C L_1 \end{matrix} \Biggr] . \end{align}\] La matrice permet donc de transformer le faisceau en commençant au plan de référence à une distance devant le système jusqu’à une distance après le système. \(\blacksquare\)
Le résultat de l’Exemple 3 nous permet de propager un rayon du foyer d’une lentille à l’autre foyer. En se plaçant au premier foyer (\(L_1 = f\)), pour aller au deuxième foyer (\(L_2 = f\)), on obtient pour une lentille mince: \[\begin{equation} \Biggl[ \begin{matrix} 1 & f \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & 0 \\ -1/f & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & f \\ 0 & 1 \end{matrix} \Biggr] = \Biggl[ \begin{matrix} 0 & f\\ -1/f & 0 \end{matrix} \Biggr] \end{equation}\] \(\blacksquare\)
Ainsi, un grand grossissement transverse est automatiquement accompagné d’un grossissement angulaire inverse. Encore une fois, pour un système optique où les milieux d’entrée et le milieu de sortie sont l’air, on aura le cas particulier mais très fréquent \(M_T M_A = 1\).
Avec un système arbitraire décrit par une matrice ABCD, on peut obtenir la position des plans principaux \(PP_1\) et \(PP_2\) par rapport aux plans de référence de la matrice en cherchant les plans conjugués placés à une distance \(L_1\) devant et \(L_2\) derrière le système optique qui le font correspondre à un système de grossissement transverse unitaire. Utilisant la condition et \(M_T = 1\), \(B=0\), et le résultat de l’Exemple 3 , on obtient : \[\begin{equation} \label{eq:plan_principal_avant} L_{PP_1} = \frac{{{n_1}/{n_2} - D}}{C} , \end{equation}\] \[\begin{equation} \label{eq:plan_principal_arriere} L_{PP_2} = \frac{{1 - A}}{C} , \end{equation}\] où \(n_1\) est l’indice du milieu au plan de référence d’entrée et \(n_2\) est l’indice au plan de référence de la sortie. La Figure 2.9 montre un exemple pour une lentille épaisse.
Avec un système arbitraire décrit par une matrice ABCD, on peut obtenir la position des plans nodaux \(PN_1\) et \(PN_2\) par rapport aux plans de référence de la matrice en cherchant les plans conjugués placés à une distance \(L_1\) devant et \(L_2\) derrière le système optique qui le font correspondre à un système de grossissement angulaire unitaire. Utilisant la condition \(M_A=1\) et \(B=0\), et le résultat de l’Exemple 3 , on obtient : \[\begin{equation} \label{eq:plan_nodal_avant} L_{PN_1} = \frac{1 - D}{C} , \end{equation}\] \[\begin{equation} \label{eq:plan_nodal_arriere} L_{PN_2} = \frac{{{n_1}/{n_2} - A}}{C} , \end{equation}\] où \(n_1\) est l’indice du milieu au plan de référence d’entrée et \(n_2\) est l’indice au plan de référence de la sortie. Notez que pour le cas particulier d’un système optique dans l’air où \(n_1 = n_2 = 1\), le plan principal et le plan nodal sont au même endroit (voir \(\eqref{eq:plan_principal_avant}\) et \(\eqref{eq:plan_nodal_avant}\) , ainsi que \(\eqref{eq:plan_principal_arriere}\) et \(\eqref{eq:plan_nodal_arriere}\) ). La Figure 2.6 montre un exemple pour une lentille épaisse.
La matrice suivante représente une interface diélectrique courbe de rayon \(R_1\) et d’indice de milieu \(n\), ensuite une épaisseur de \(d\) et une seconde interface courbe vers l’air de rayon \(R_2\): \[\begin{align} \Biggl[ \begin{matrix} 1 & 0\\ \frac{n-1}{R_2} & n \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & d\\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & 0\\ \frac{1-n}{n R_1} & 1/n \end{matrix} \Biggr] &= \nonumber \\ \Biggl[ \begin{matrix} \frac{d (1-n)}{n R_1} + 1 & \frac{d}{n}\\ -(n-1) \Bigl[\frac{1}{R_1} - \frac{1}{R_2} + \frac{d(n-1)}{n R_1 R_2} \Bigr] & 1 + \frac{d(n-1)}{n R_2} \end{matrix} \Biggr] . \end{align}\] On peut donc rapidement identifier l’expression pour la distance focale avec le formalisme matriciel, et l’on voit que l’élément est la distance focale d’une lentille épaisse comme donnée par l’équation du Lensmaker. \(\blacksquare\)
Le point focal est défini comme étant le point où un rayon parallèle à l’axe convergera sur l’axe optique. Ainsi, avec un peu de géométrie simple, en considérant les plans principaux et on voit que les rayons parallèles à l’axe (\(\theta = 0\)) sont transformés : \[\begin{equation} \theta^\prime = C y , \end{equation}\] À l’aide de la Figure 2.10, on voit que:
\[\begin{eqnarray} \tan \theta \approx \theta & = & y/f \\ - Cy & = & y/f\\ C & = & - 1/f . \end{eqnarray}\]
Cette distance est définie par rapport au plan principal de sortie (Figure 2.10).
Le système 2f, qui s’utilise en plaçant un objet au foyer et en regardant les rayons à l’autre foyer peut être vu ici à l’aide du formalisme matriciel. La matrice qui transforme le rayon d’un foyer à l’autre foyer est simplement: \[\begin{equation} \mathbf{M}_{2f} = \Biggl[ \begin{matrix} 1 & f_1 \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & 0 \\ -\frac{1}{f_1} & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & f_1 \\ 0 & 1 \end{matrix} \Biggr] = \Biggl[ \begin{matrix} 0 & f_1 \\ -\frac{1}{f_1} & 0 \end{matrix} \Biggr] . \end{equation}\]
Le système 2f, puisque \(B \ne 0\), n’est pas un système imageant. On ne peut définir de grossissement.
Le système 4f présenté à la Figure 2.7 peut être revu ici à l’aide du formalisme matriciel. On obtient la matrice représentant un système 4f avec: \[\begin{equation} \mathbf{M}_{4f} = \Biggl[ \begin{matrix} 1 & f_2 \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & 0 \\ -\frac{1}{f_2} & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & f_2 \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & f_1 \\ 0 & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & 0 \\ -\frac{1}{f_1} & 1 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 1 & f_1 \\ 0 & 1 \end{matrix} \Biggr] , \end{equation}\]
\[\begin{equation} \mathbf{M}_{4f} = \Biggl[ \begin{matrix} 0 & f_2 \\ -\frac{1}{f_2} & 0 \end{matrix} \Biggr] \Biggl[ \begin{matrix} 0 & f_1 \\ -\frac{1}{f_1} & 0 \end{matrix} \Biggr] =\Biggl[ \begin{matrix} -\frac{f_2}{f_1} & 0 \\ 0 & -\frac{f_1}{f_2} \end{matrix} \Biggr] . \end{equation}\]
Le système 4f, qui s’utilise avec un objet placé au foyer de la première lentille, est donc un système imageant car \(B=0\) . Il est aussi évidemment la combinaison de deux systèmes 2f.
Puisque le système est un système imageant, le grossissement transverse est simplement donné par l’Éq. \(\eqref{eq:grossissement_transverse}\) , \(M_T=-\frac{f_2}{f_1}\).
Prenez note: certains auteurs (dont A.E. Siegman) définissent le rayon avec l’indice de réfraction \(\mathbf{r} \equiv \Biggl[ \begin{matrix} y \\ n\theta \\ \end{matrix} \Biggr]\). Cette définition permet d’avoir le déterminant des matrices égal à 1, mais a comme résultat que les matrices ABCD sont différentes de celles présentées ici.
Définir et savoir identifier les diaphragmes d’entrée et de champ, les pupilles d’entrée et de sortie, les fenêtres d’entrée et de sortie ;
Expliquer l’importance des diaphragmes dans un instrument ;
Définir et savoir tracer le rayon principal et la rayon marginal d’une source ponctuelle ;
Définir le \(f\)-number d’un système.
Savoir calculer la quantité de lumière captée par un système.
Une description complète d’un système optique se doit d’aller au-delà des propriétés imageantes d’un système. En effet, la largeur finie des composantes optiques aura des conséquences évidentes sur la capacité d’un système à obtenir une image, que ce soit au niveau de la quantité de lumière captée ou au niveau du champ visible au plan image. La présente section discute de ces limites.
Le rôle du diaphragme d’entrée (aperture stop) est de limiter la quantité de lumière en provenance d’un point. Le diaphragme d’entrée d’un système optique est défini comme le plan qui limite l’étendue angulaire d’une source ponctuelle sur l’axe. Voir Figure 2.11 et Figure 2.12.
Pour trouver le diaphragme d’entrée, on peut faire un calcul à l’aide des matrices ABCD pour obtenir la position \(r(z)\) d’un rayon quelconque. En divisant par le diamètre réel \(D(z)\) du système à la position \(z\), l’endroit où le ratio \(r(z)/D(z)\) est le plus grand sera le diaphragme d’entrée. \(\blacksquare\)
L’image du diaphragme telle que vue de l’objet est la pupille d’entrée (entrance pupil). Elle représente ce qui limite le cône de rayon tel que vu par l’objet.
L’image du diaphragme telle que vue de l’image (finale du système) est la pupille de sortie (exit pupil). Elle représente ce qui limite le cône de rayon tel que vu par l’image.
Chaque point de l’objet possède un rayon principal, qui est le rayon le plus important ou le plus représentatif provenant d’une source ponctuelle. Le rayon principal (chief ray) part d’un point sur l’objet et passe par le centre du diaphragme d’entrée. Il se dirige donc directement vers le centre de la pupille d’entrée. Puisque les pupilles sont des plans conjugués du diaphragme, le rayon principal passe aussi par le centre de la pupille de sortie
Chaque point de l’objet possède un rayon marginal, qui est le “dernier” rayon qui atteindra le point image. Le rayon marginal (marginal ray) part d’un point sur l’objet et touche l’extrémité du diaphragme d’entrée (ou de la pupille, puisque ce sont des plans conjugués).
Le système optique va évidemment limiter la largeur de l’image au plan image. Le rayon principal provenant d’un point sera éventuellement bloqué par ce qu’on définit comme le diaphragme de champ (“field stop”). Le diaphragme de champ (field stop) est normalement l’étendue de la caméra ou du film. Voir Figure 2.13.
Si le diaphragme de champ n’est pas dans un plan image de l’objet, le rayon principal sera partiellement bloqué. Le diaphragme de champ peut être la grosseur finie d’une lentille sans être au plan image: on parlera de vignetting car l’intensité sera diminuée graduellement avant d’atteindre les limites du plan image. Ce cas est souvent sous-optimal car on n’utilise pas à pleine capacité le détecteur. Voir l’exemple à la Figure 2.14.
Pour trouver le diaphragme de champ:
On se place dans le plan objet
On se positionne à partir de l’axe optique et on s’éloigne
On trace le rayon principal (i.e. par le centre de la pupille d’entrée)
Si le rayon principal n’est pas bloqué nulle part, on repart à 2, un peu plus loin de l’axe
Si le rayon principal est bloqué, on a trouvé le diaphragme de champ (FS)
\(\blacksquare\)
L’image du diaphragme de champ telle que vue de l’objet est la fenêtre d’entrée. Elle représente ce qui limite l’étendue de l’image tel que vue par l’objet.
L’image du diaphragme de champ telle que vue de l’image est la fenêtre de sortie. Elle représente ce qui limite l’étendue de l’objet tel que vue par l’image.
Pour quantifier la quantité de lumière qu’un système peut accepter, on parle de son \(f\)-number, ou \(f/ \#\) : \[\begin{equation} f/\# = \frac{f}{D_{PE}}, \end{equation}\] où \(D_{PE}\) est le diamètre de sa pupille d’entrée et \(f\) la distance focale. La quantité de lumière captée par le système optique est proportionnelle à \[\begin{equation} \text{Lumière captée} \propto \frac{D_{PE}^2} {f^2} \propto \frac{1}{(f/\#)^2} , \end{equation}\] c’est pourquoi la pupille est une quantité importante lors de la caractérisation d’un système. Elle permet de calculer l’angle solide couvert par le système. Très souvent, la pupille d’entrée sera la lentille, c’est pourquoi on peut parler du \(f/\#\) d’une lentille, qui caractérise la lentille lorsque le faisceau couvre la surface d’entrée. On parle aussi parfois du f-number effectif d’un système lorsque le faisceau est plus petit que la lentille \(f_{\text{eff}}/\# = \frac{f}{D_{\text{faisceau}}}\).
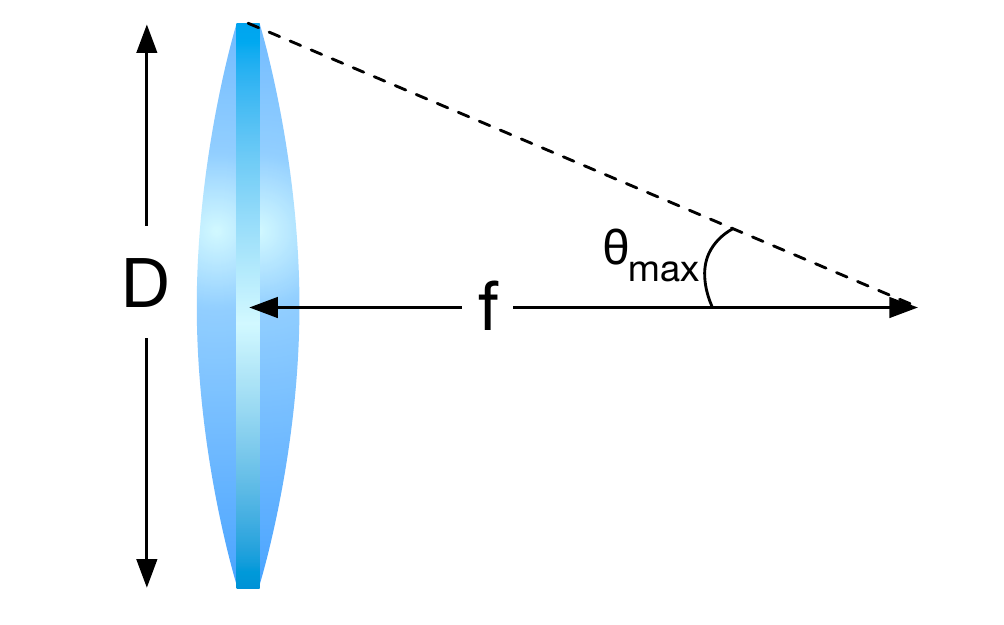
En microscopie et en fibre optique, on utilise souvent une définition alternative au qu’on appelle l’ouverture numérique (numerical aperture ou simplement NA). L’ouverture numérique représente le sinus du demi-angle maximal d’entrée. Ainsi, on a: \[\begin{equation} \text{NA} \equiv \sin \theta_\text{max} = \frac{D}{2f} = \frac{1}{2 f{/\#}} , \end{equation}\] \[\begin{equation} \text{Lumière captée} \propto \text{NA}^2 . \end{equation}\]
La connaissance de ces limites physiques est essentielle pour bien caractériser un système optique. En optique géométrique, \(\lambda \rightarrow 0\) , mais en optique de Fourier, \(\lambda \ne 0\), nous verrons que le diamètre d’un faisceau laser focalisé par une lentille sera de \(\lambda \times f /\#\) lorsque celui-ci remplit la lentille.
Nous verrons aussi que la transformée de Fourier de la pupille d’entrée donne le patron complet du champ électrique au plan image.
Lire l’article Raytracing publié dans Neurophotonics.
Expliquer la diffraction et son origine physique, comprendre les conditions selon lesquelles une onde diffracte ou non ;
Expliquer le principe de Huygens-Fresnel ;
Savoir faire des calculs de diffraction pour des profils d’illuminations simples ou complexes ;
Comprendre, savoir expliquer et reconnaître que la diffraction de Fraunhofer correspond à la transformées de Fourier du champ électrique incident ;
Savoir faire la correspondance d’échelle pour les ca lculs de diffraction faisant appel aux transformés de Fourier, dans le cas de l’utilisation d’une lentille ou non ;
Savoir faire des calculs à l’aide de méthodes numériques pour obtenir le patron de diffraction d’un profil arbitraire ;
Connaître le critère de sélection pour les régimes de Fraunhofer et Fresnel, comprendre appliquer ces critères pour résoudre des problèmes ;
Connaître et savoir identifier des paires de transformées de Fourier importantes.
La diffraction est la variation du profil (amplitude ou front d’onde) d’une onde à la suite de sa propagation. Ce phénomène se produit aussitôt qu’une inhomogénéité existe en amplitude ou en phase. Seule une onde plane infinie ne diffracte pas: toute onde de dimension finie diffracte lorsqu’elle se propage (Figure 3.1).
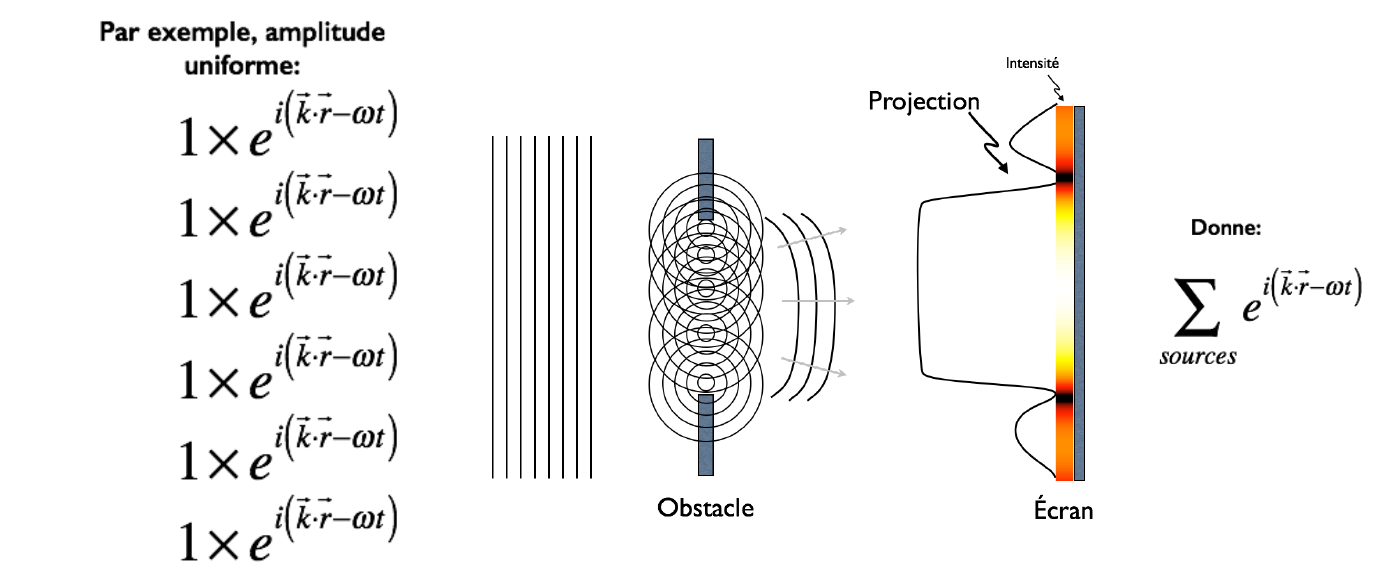
Le principe de Huygens-Fresnel dicte qu’on peut représenter une onde comme la superposition de multiples ondes sphériques (ou sources ponctuelles). La somme de toutes les contributions (amplitude et phase) permet d’obtenir le champ à une distance arbitraire, tel que montré à la Figure 3.2. De façon mathématique, pour une distribution de sources continues sur la fente \(\mathbf{E_\Sigma (r\prime)}\), on obtient le champ lointain \(\mathbf{E}_\sigma(r)\): \[\begin{equation} \label{eq:huygens_fresnel} \mathbf{E}_\sigma (r) \approx \int \mathbf{E}_\Sigma \frac{e^{ik \lvert \mathbf{r-r\prime} \rvert }}{\mathbf{r-r\prime}} d\mathbf{r\prime} . \end{equation}\] Le signe \(\approx\) est utilisé car un traitement plus complet avec les équations de Kirchoff-Fresnel montrerait la présence d’un facteur additionnel de \(e^{-i\pi/2}\).
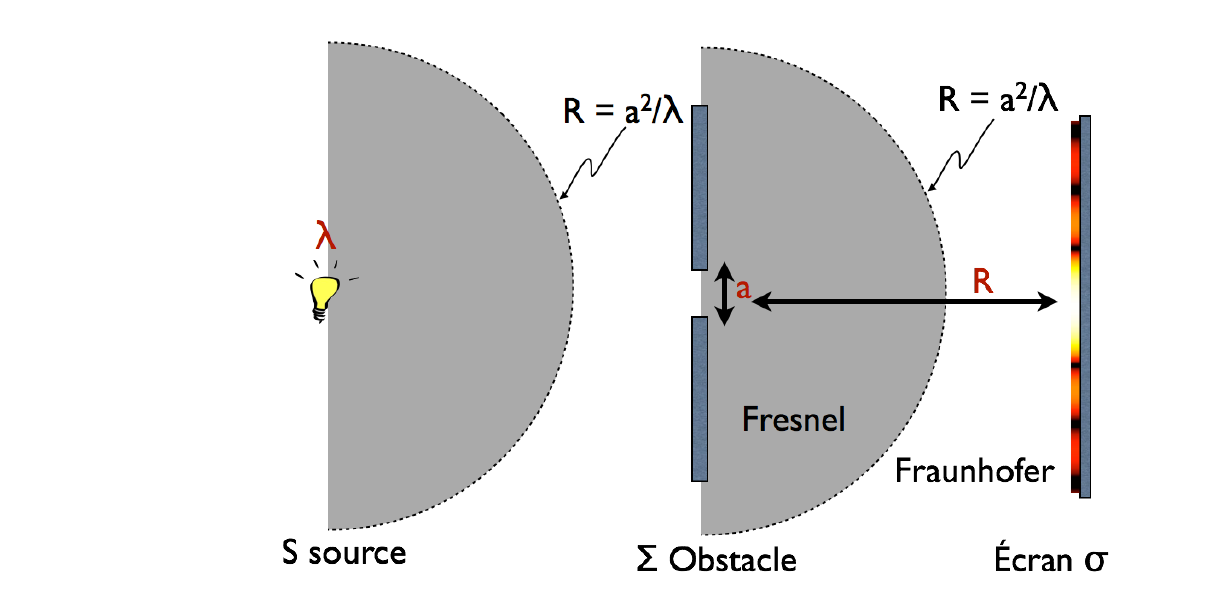
On peut appliquer le principe de Huygens-Fresnel à la diffraction en champ lointain. Lorsque la source \(S\) est à une distance supérieure à \(a^2/\lambda\) de l’obstacle \(\Sigma\), et que l’écran \(\sigma\) est à une distance supérieure à \(a^2/\lambda\) de l’obstacle \(\Sigma\), on parle du régime de Fraunhofer. Dans ces conditions en se référant à la Figure 3.3, on peut utiliser la loi des cosinus:
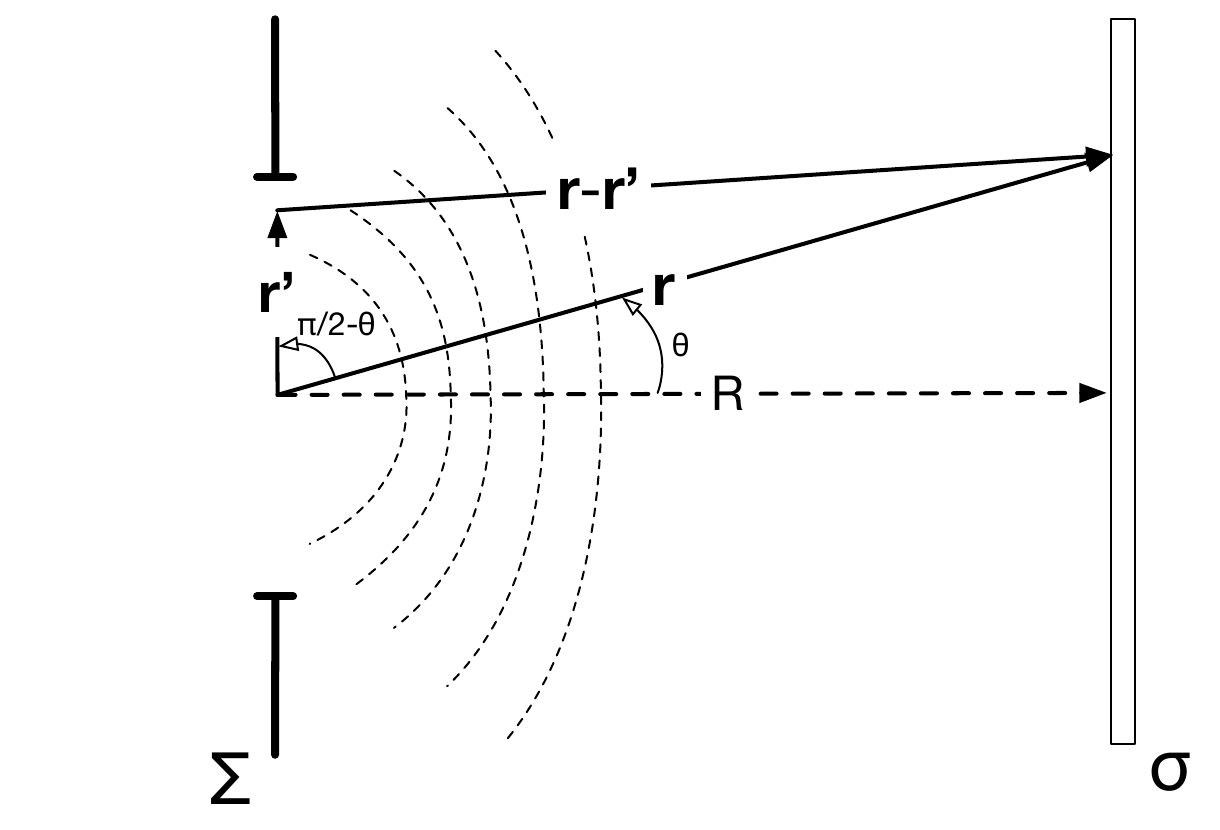
\[\begin{equation} \lvert \mathbf{r\prime - r} \rvert ^2 \approx \lvert \mathbf{r} \rvert ^2 + \lvert \mathbf{r\prime} \rvert ^2 - 2 \lvert \mathbf{r} \rvert \lvert \mathbf{r} \rvert \sin \theta , \end{equation}\] que l’on développe en série de MacLaurin: \[\begin{equation} \lvert \mathbf{r\prime - r} \rvert = R - r\prime \sin \theta + \frac{r\prime^2}{2R} \cos ^2 \theta + ... , \end{equation}\] avec \(r \equiv \lvert \mathbf{r} \rvert \approx R\) et \(r\prime \equiv \lvert \mathbf{r\prime} \rvert\) pour ensuite ré-écrire l’Éq. \(\eqref{eq:huygens_fresnel}\) comme: \[\begin{equation} \label{eq:fraunhofer_cartesien} E_\sigma (\sin \theta_x, \sin \theta_y) \approx \int E_\Sigma (x\prime, y\prime)e^{-ikx\prime \sin \theta_x -iky\prime\sin \theta_y} dx\prime dy\prime . \end{equation}\] L’Équation \(\eqref{eq:fraunhofer_cartesien}\) constitue l’équation de Fraunhofer. Elle est valide lorsque le terme de phase peut être approximé par \(k \lvert \mathbf{r\prime - r} \rvert = k R - k r\prime \sin \theta\) et que le terme \(k \frac{r\prime^2}{2R} \cos ^2 \theta \approx \frac{\pi r\prime^2}{R \lambda} \ll 1\) est négligeable sur toute l’intégrale donc \(\frac{\pi a^2}{R \lambda} \ll 1\).
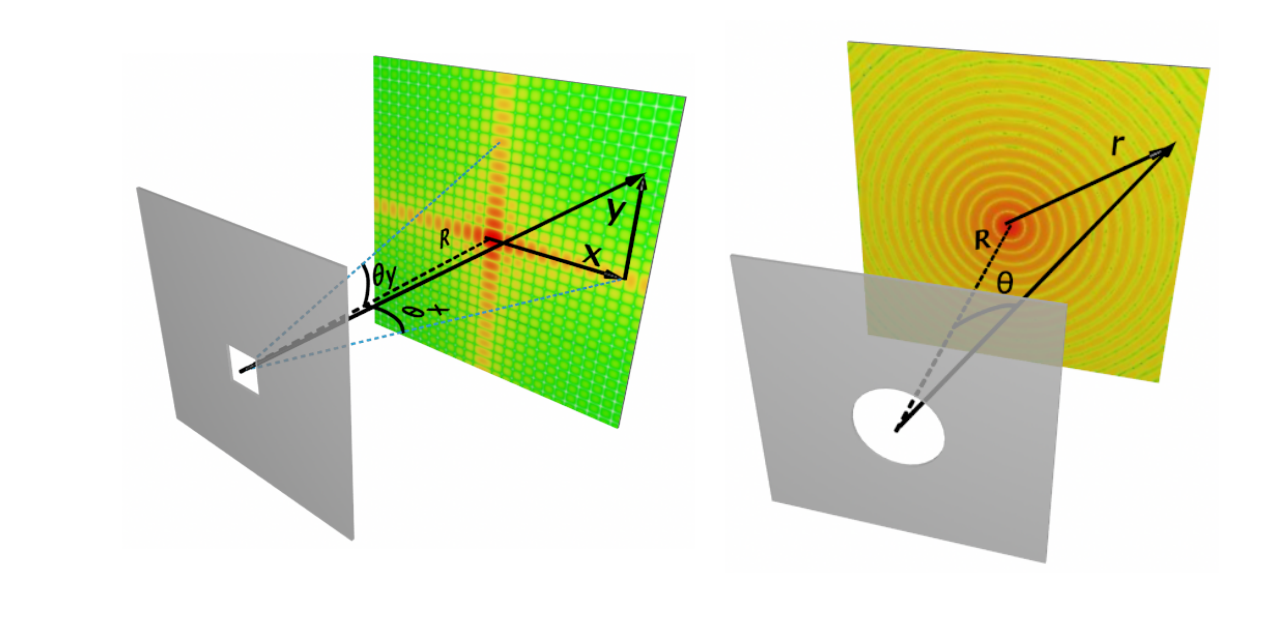
Pour obtenir la distribution du champ sur l’écran (aux positions \(x\) et \(y\)), on peut soit prendre la limite où l’écran est très loin \(R \to \infty\), ou placer une lentille après l’obstacle et placer l’écran à une distance focale de la lentille, ce qui essentiellement transforme un angle de sortie \(\theta\) en position sur l’écran \(\sigma\). Le calcul peut se faire avec les angles \(\theta_x\) et \(\theta_y\), et la correspondance sur l’écran peut se faire simplement avec \(\theta_x = x/R\) et \(\theta_y = y/R\) en coordonnées cartésiennes, ou \(\theta = r/R\).
\[\begin{equation} E_\sigma (x,y)\approx \frac{e^{ikR}}{R} \int E_\Sigma (x\prime, y\prime) e^{-ikx\prime \frac{x}{R} - iky\prime \frac{y}{R} }dx\prime dy\prime \end{equation}\]
\[\begin{equation} E_\sigma (x,y)\approx \frac{e^{ikf}}{f} \int E_\Sigma (x\prime, y\prime) e^{-ikx\prime \frac{x}{f} - iky\prime \frac{y}{f} }dx\prime dy\prime \end{equation}\]
On constate que l’Éq. \(\eqref{eq:fraunhofer_cartesien}\) a la forme d’une transformée de Fourier en 2D, avec les variables conjuguées \(x\) et \(k\sin \theta_x\), de même que \(y\) et \(k\sin \theta_y\) . On peut définir les vecteurs spatiaux transverses: \[\begin{eqnarray} k_x \equiv k \sin \theta_x , \\ k_y \equiv k \sin \theta_y \end{eqnarray}\] pour simplifier l’écriture mais nous verrons à la section suivante l’interprétation de ces vecteurs. Ainsi, avec la définition des transformées de Fourier suivantes (il existe plusieurs conventions) pour les paires de variables conjuguées \(\left\{ \omega,t\right\}\): \[\begin{equation} F(\omega) \equiv \int_{-\infty}^{+\infty} f(t) e^{-i \omega t} dt = \mathfrak{F}\left\{ f(t) \right\} , \end{equation}\] \[\begin{equation} f(t) \equiv \frac{1}{2\pi} \int_{-\infty}^{+\infty} F(\omega) e^{i\omega t} d \omega = \mathfrak{F}^{-1}\left\{ F(\omega) \right\}, \end{equation}\] on peut ré-écrire la diffraction de Fraunhofer sous la forme : \[\begin{equation} E_{\sigma}(k_x,k_y ) \approx \frac{{{e^{i{kR}}}}}{R} \mathfrak{F} \left\{ E_\Sigma(x\prime,y\prime) \right\}. \end{equation}\]
Toutes les propriétés connues des transformées de Fourier (voir la section sur les propriétés) pourront être utilisées pour traiter les problèmes de diffraction, pour autant que l’on associe les variables d’espace \(x,y\) avec leurs variables conjuguées \(k_x \equiv k \sin \theta_x\) et \(k_y \equiv k \sin \theta_y\).
Une fente rectangulaire de largeur \(a\) et \(b\) selon les directions \(x\prime\) et \(y\prime\) est illuminée par une onde plane cohérente d’amplitude \(E_\circ\) et de longueur d’onde \(\lambda\). Le patron de diffraction en fonction de la position \(x\) et \(y\) sur un écran à une distance éloignée \(R\) est : \[\begin{align*} E_{\sigma}(x,y) &\approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {E_\Sigma(x\prime,y\prime){e^{ - ik x\prime \frac{x}{R} - ik y\prime \frac{y}{R}}}dx\prime dy\prime} \\ &\approx \frac{{{e^{i{kR}}}}}{R}\int_{-a/2}^{a/2} dx\prime \int_{-b/2}^{b/2}dy\prime E_\circ {e^{ - ik x\prime \frac{x}{R} - ik y\prime \frac{y}{R}}} \\ & \approx E_{\sigma}(x,y) \approx \frac{E_\circ {{e^{i{kR}}}}}{R} \left. \frac{e^{- ik x\prime \frac{x}{R}}}{- ik\frac{x}{R}} \right|_{-a/2}^{a/2} \left. \frac{e^{- ik y\prime \frac{y}{R}}}{-ik \frac{y}{R}} \right|_{-b/2}^{b/2} \\ &\approx \frac{E_\circ {{e^{i{kR}}}}}{R} \left[ a \frac{ \sin \left( \frac{kax}{2R} \right) }{ \frac{kax}{2R}} \right] \left[ b \frac{ \sin \left( \frac{kby}{2R} \right) }{ \frac{kby}{2R}} \right] \\ &\approx \frac{E_\circ{{e^{i{kR}}}} ab}{R} {\rm sinc} \left( \frac{\pi ax}{\lambda R} \right) {\rm sinc} \left( \frac{\pi by}{\lambda R} \right) . \\ I_{\sigma}(x,y) &\approx \left| E_\circ \right|^2 \left( \frac{ab}{R} \right)^2 {\rm sinc}^2 \left( \frac{\pi ax}{\lambda R} \right) {\rm sinc}^2 \left( \frac{\pi by}{\lambda R} \right) . \end{align*}\] On remarque que la largeur du patron de diffraction à l’écran est donnée par \(\frac{R\lambda}{a\pi}\): si la fente est petite, la tache de diffraction est grande. \(\blacksquare\)
Une fente circulaire de rayon \(a\) est illuminée par une onde plane cohérente d’amplitude \(E_\circ\) et de longueur d’onde \(\lambda\). Le patron de diffraction en fonction de la position \(r\) est donné par: \[\begin{equation*} E_{\sigma}(x,y) \approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {E_\Sigma(x\prime,y\prime){e^{ - ik x\prime \frac{x}{R} - ik y\prime \frac{y}{R}}}dx\prime dy\prime} . \end{equation*}\] On utilise \(x=r \cos \phi\) et \(y=r \sin \phi\): \[\begin{equation*} E_{\sigma}(r,\phi) \approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {E_\Sigma(r\prime,\phi\prime){e^{ - ik r\prime \cos \phi\prime \frac{r \cos\phi}{R} - ik r\prime \sin \phi\prime \frac{r \sin\phi}{R}}} r\prime d\phi\prime dr\prime} , \end{equation*}\] de même que \(\cos (u-v) = \cos u \cos v+ \sin u \sin v\) \[\begin{equation*} E_{\sigma}(r, \phi) \approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {{e^{- i\frac{kr\prime r}{R} \cos ( \phi\prime - \phi) }} r\prime d\phi\prime dr\prime}. \end{equation*}\] En utilisant les propriétés des fonctions de Bessel (Section 3.6 de ce chapitre), on arrive à: \[\begin{align*} E_{\sigma}(r) &\approx \frac{E_\circ{{e^{i{kR}}}} 2 \pi}{R} \int_0^{a} J_0 \left( \frac{kr\prime r}{R} \right) r\prime dr\prime \\ &\approx \frac{2 E_\circ{{e^{i{kR}}}} \pi a^2}{R} \frac{J_1 \left( \frac{2\pi a r}{\lambda R} \right)}{ \frac{ 2\pi a r}{\lambda R} } \\ I_{\sigma}(r) &\approx \frac{ \left|E_\circ\right|^2 \pi^2 a^4}{R^2} \left[ \frac{2 J_1 \left( \frac{ 2\pi ar}{\lambda R} \right)}{ \frac{2\pi ar}{\lambda R} } \right]^2 . \end{align*}\] On remarque que la largeur du patron de diffraction à l’écran est donnée par \(\frac{R\lambda}{2\pi a}\): si la fente est petite, la tache de diffraction est grande. \(\blacksquare\)
Un masque en amplitude de forme gaussienne et de rayon gaussien \(a\) est illuminée par une onde plane cohérente d’amplitude \(E_\circ\) et de longueur d’onde \(\lambda\). Le patron de diffraction en fonction de la position \(x,y\) est donné par : \[\begin{align*} E_{\sigma}(x,y) &\approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {E_\Sigma(x\prime,y\prime){e^{ - ik x\prime \frac{x}{R} - ik y\prime \frac{y}{R}}}dx\prime dy\prime} \\ &\approx \frac{{{e^{i{kR}}}}}{R}\int_\Sigma {E_\circ e^{\frac{-x\prime^2-y\prime^2}{a^2}}{e^{ - ik x\prime \frac{x}{R} - ik y\prime \frac{y}{R}}}dx\prime dy\prime}. \end{align*}\] Ce problème a exactement la forme de la transformée de Fourier d’une gaussienne en 2D avec les variables conjuguées \(x \prime\) et \(k\prime_x \equiv \frac{kx}{R}\), de même que \(y \prime\) et \(k\prime_y \equiv \frac{ky}{R}\): \[\begin{equation*} E_{\sigma}(x,y) \approx \frac{{{e^{i{kR}}}}}{R}\int_{-\infty}^{+\infty} {E_\circ e^{\frac{-x\prime^2}{a^2}}{e^{ - i k\prime_x x\prime }} dx\prime }\int_{-\infty}^{+\infty} {E_\circ e^{\frac{-y\prime^2}{a^2}}{e^{ - i k\prime_y y\prime }} dy\prime} . \end{equation*}\] On obtient donc directement: \[\begin{equation*} E_{\sigma}(x,y) \approx \frac{{{\pi a^2 e^{i{kR}}}}}{R} e^{- \frac{a^2}{4}\left( k\prime_x^2 + k\prime_y^2\right)} = \frac{{{\pi a^2 e^{i{kR}}}}}{R} e^{- \frac{a^2k^2}{4R^2}\left( x^2 + y^2 \right)}. \end{equation*}\] On remarque que le profil reste gaussien. On remarque aussi que la largeur du patron de diffraction à l’écran est donnée par \(\frac{R\lambda}{a\pi}\): si le masque est petit, la tache de diffraction est grande. \(\blacksquare\)
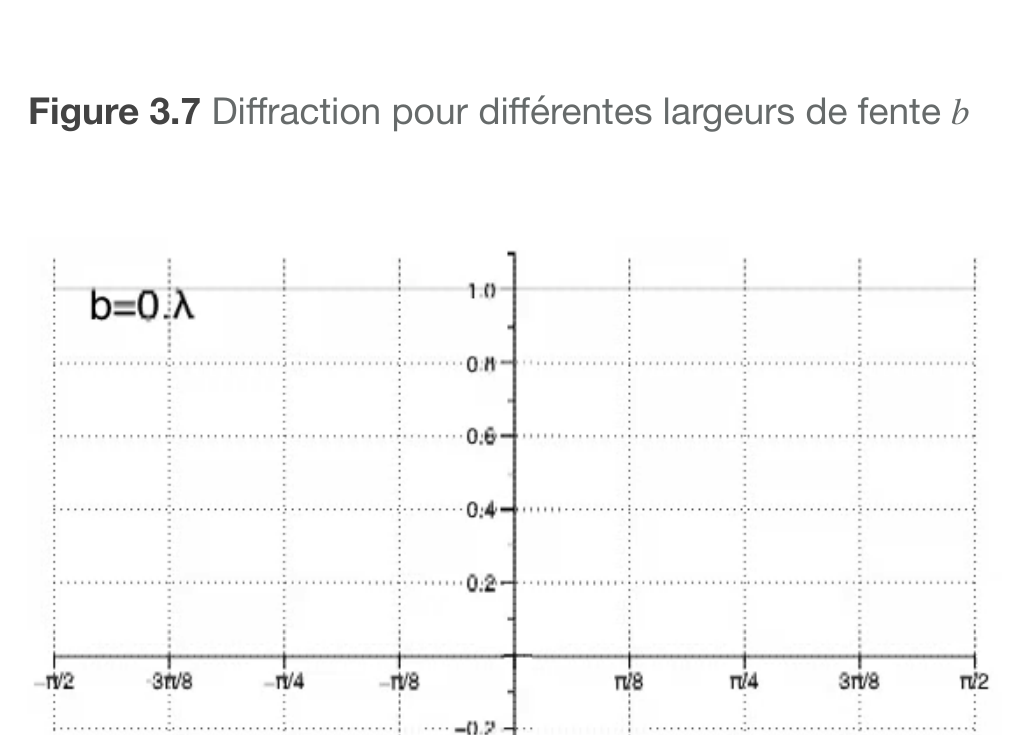
Une fente de largeur laisse passer complètement la lumière à l’intérieur de la fente, et bloque la lumière à l’extérieur de la fente. En utilisant l’Éq. \(\eqref{eq:fraunhofer_cartesien}\) , on peut écrire: \[\begin{align*} E_{\sigma}(\sin\theta ) &\approx \frac{E_\circ {{e^{i{kR}}}}}{R}\int_{-b/2}^{b/2} {{e^{ - ik\sin \theta y\prime }} dy\prime} \\ &\approx \frac{{{E_\circ e^{i{kR}}}}}{R} \left[ \frac{e^{ - ik\sin \theta y\prime}}{ - ik\sin \theta } \right]^{b/2}_{b/2} \\ &\approx \frac{{{E_\circ b e^{i{kR}}}}}{R} \left[ \frac{\sin \left( \frac{kb}{2} \sin \theta \right)}{\frac{kb}{2} \sin \theta} \right] \\ &\approx \frac{{{E_\circ b e^{i{kR}}}}}{R}~\rm{sinc} \left( \frac{kb}{2} \sin \theta \right) . \end{align*}\] Le champ diffracté est illustré à la Figure 3.7 pour différentes largeurs de fentes. \(\blacksquare\)
On dit qu’un système optique peut résoudre deux taches focales lorsque celles-ci sont disposées de façon à ce que le maximum de l’une soit sur le premier minimum de l’autre (critère de Rayleigh, il en existe d’autres). Pour un faisceau incident sur une lentille de diamètre \(D\), on obtient (de l’Exemple 9 ): \[\begin{equation*} I_{\sigma}(r) \approx \frac{ \left|E_\circ\right|^2 \pi a^2}{f^2} \left[ \frac{2 J_1 \left( \frac{ 2\pi ar}{\lambda f} \right)}{ \frac{2\pi ar}{\lambda f} } \right]^2. \end{equation*}\] Le système est à la limite de résolution lorsque \(2\pi ar/(\lambda f) = 3.82\), donc les deux taches sont séparées en distance par: \[\begin{equation*} r = 1.22\ \lambda f/D = 1.22\ \lambda f_\# . \end{equation*}\]
Une onde d’étendue finie ou de front d’onde inhomogène diffracte.
Une onde plane (infinie) ne diffracte pas. C’est la seule onde qui ne diffracte pas.
Une onde sphérique diffracte.
La diffraction a pour effet de changer le profil d’intensité de l’onde, son front d’onde, ou les deux.
Un obstacle qui obstrue une onde, donc limite l’intensité au-delà de certaines frontières, produira nécessairement la diffraction de ce faisceau.
Principe de Huygens-Fresnel: Toute onde peut être représentée comme une superposition d’ondes sphériques.
On obtient le profil de l’onde en champ éloigné en additionnant toutes les contributions des ondes sphériques, avec leur phase.
Des problèmes plus complets avec solutions sont disponibles dans la section 3.5.
Tous les livres d’optique de la section Références (préface) traitent de la diffraction. Pedrotti est plutôt didactique, Saleh et Teich est plutôt “sans-détour”. Mertz le traite avec l’optique de Fourier sans donner de détails pour les non-initiés.
Du code MATLAB très simple pour illustrer les patrons de diffraction d’une fente carrée, circulaire ou arbitraire est disponible sur GitHub .
Expliquer et savoir calculer les propriétés des réseaux de diffraction ;
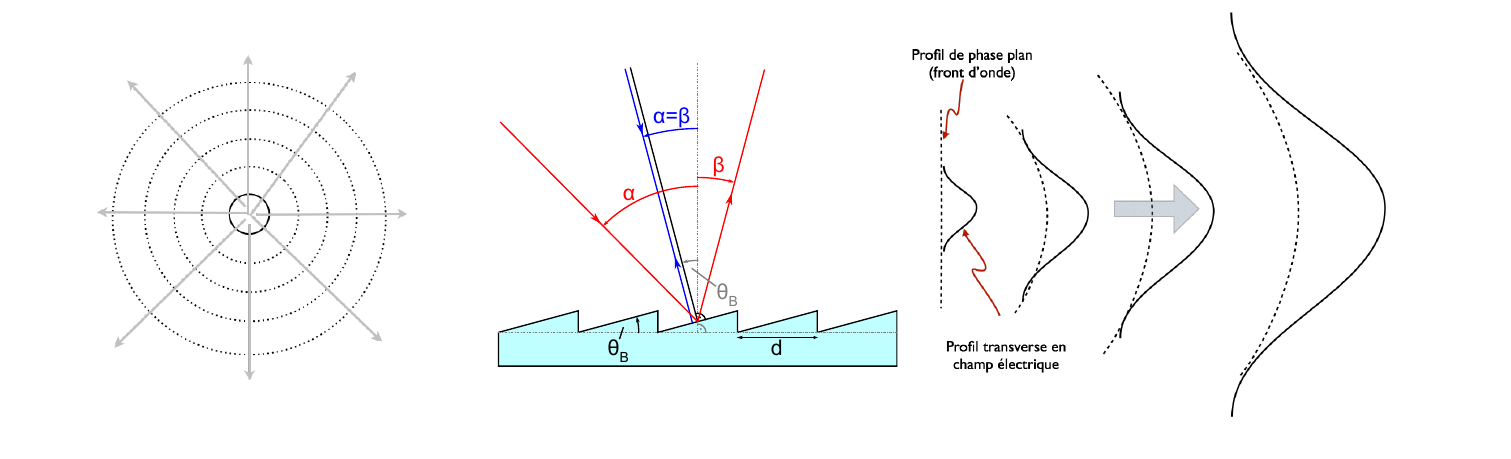
Nommer, identifier et connaître les propriétés spécifiques des trois types de réseaux d’amplitude, de phase et blasé ;
Définir et expliquer l’intervalle spectral libre, la dispersion angulaire, la résolution et le pouvoir de résolution et savoir les utiliser dans des calculs.
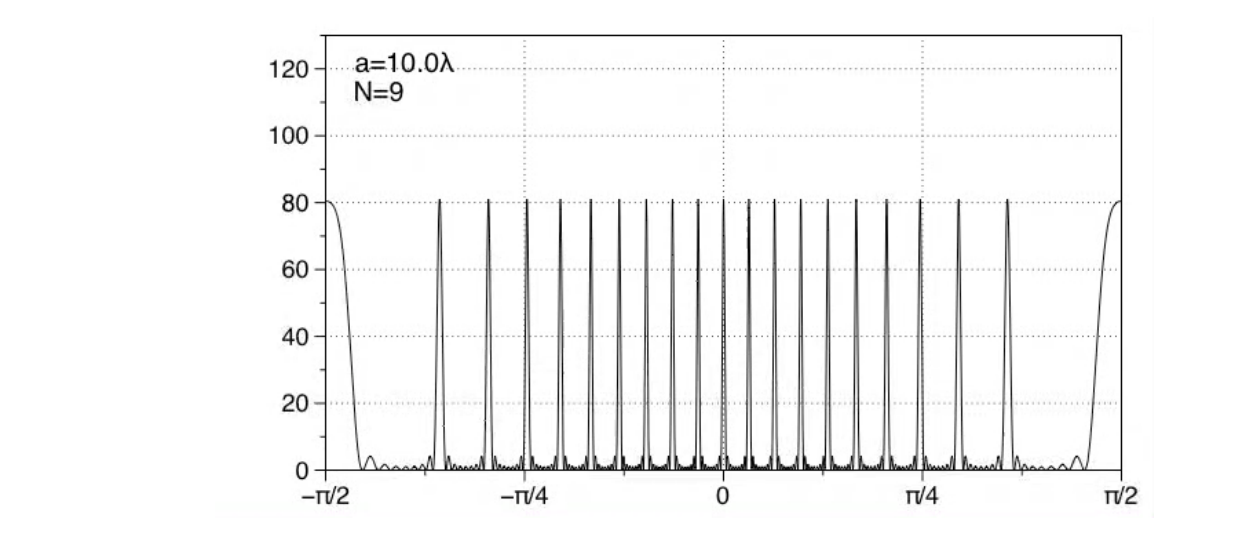
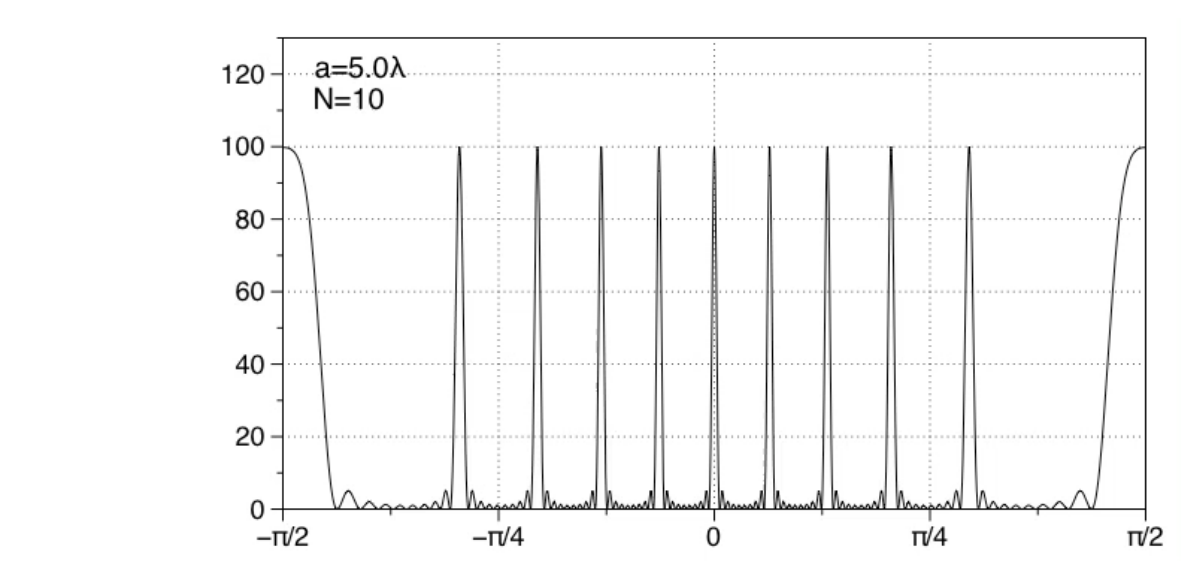
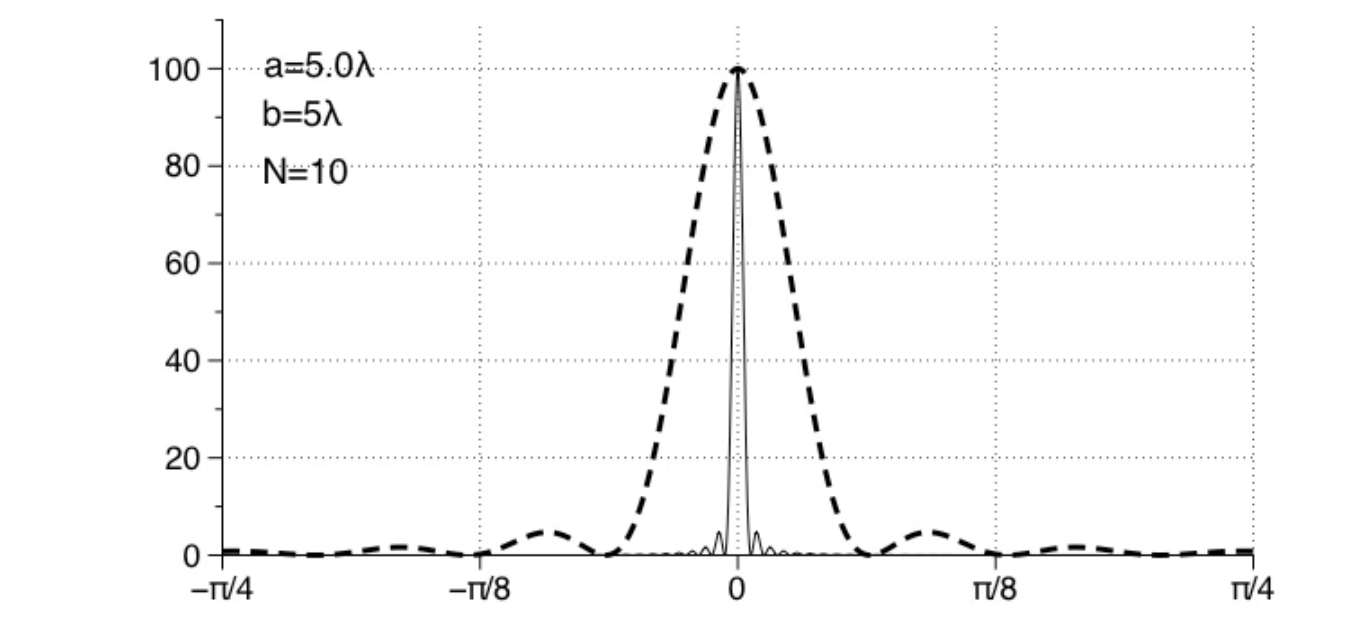
On peut s’intéresser à la diffraction provenant de structures périodiques. Par exemple, le champ électrique \(E_\sigma(y')\) diffracté par un réseau de fentes de largeur \(b\) séparées par une distance \(a\) (Figure 3.9) s’écrit avec une illumination constante à incidence normale \(E_\Sigma(y) = 1\) si \(|y|<D/2\): \[\begin{align*} E_{\sigma}(k \sin\theta ) &\approx \int dy\prime \bigg[ E_\Sigma(y') \frac{e^{i k (R-y\prime\sin\theta)}}{R} \\ &\quad + E_\Sigma(y'-a)\frac{e^{i k (R-(y\prime-a)\sin\theta)}}{R} \\ &\quad + \dots + E_\Sigma(y'-Na)\frac{e^{i k (R-(y\prime-Na)\sin\theta)}}{R} \bigg] \\ &\approx \frac{e^{i k R}}{R} \sum_{n=0}^{N} \mathfrak{F} \left\{ E_\Sigma(y'-na) \right\} . \end{align*}\] En utilisant la propriété de translation dans l’espace réel (\(y'\)) qui devient une phase de l’espace de fréquences (\(k\sin \theta\)), et considérant que le terme \(\mathfrak{F} \left\{ E_\Sigma(y') \right\}\) est le même pour chaque terme de la source (le terme de diffraction d’une fente, qui est la transformée de Fourier de l’illumination est décrite à l’Exemple 11 ), on peut écrire: \[\begin{equation} E_{\sigma}(k\sin\theta ) \approx \mathfrak{F} \left\{ E_\Sigma(y') \right\}\sum_{n=0}^{N} e^{inka \sin \theta } \end{equation}\] Sachant que la série géométrique \(\sum_{n=0}^{N} e^{inka \sin \theta }\) est égale à \(\frac{1-e^{iNka\sin\theta}}{1-e^{ika\sin\theta}}\), on obtient après manipulations: \[\begin{equation} \label{eq:diffraction-reseau} E_{\sigma}(\sin\theta ) \approx \frac{{{E_\circ b e^{i{kR}}}}}{R}~ \underbrace{\frac{\sin \left( \frac{kb}{2} \sin \theta \right)}{ \frac{kb}{2} \sin \theta }}_{\text{diffraction}} \underbrace{\frac{\sin\left(\frac{Nka}{2}\sin \theta\right)}{\sin\left(\frac{ka}{2} \sin \theta\right)}}_{\text{interférence}} \end{equation}\] Le terme dépendant de est le terme de diffraction d’une fente unique (voir Fig. 3.7 ). Il représente l’enveloppe du patron de diffraction. Le terme d’interférence dépendant de la périodicité \(a\) et du nombre de fentes \(N\) créé les ordres supérieurs d’interférence et est responsable de la séparation spectrale. Puisque \(Na > b\), la composante d’interférence varie beaucoup plus rapidement que la composante de diffraction de la fente. La fonction \(\frac{\sin\left(\frac{Nka}{2}\sin \theta\right)}{\sin\left(\frac{ka}{2} \sin \theta\right)}\) aura un maximum chaque fois que le numérateur et le dénominateur seront 0, c’est-à-dire lorsque \(\frac{ka}{2}\sin \theta = {m \pi}\) que l’on peut ré-écrire: \[\begin{equation} a\sin \theta = {m \lambda}. \end{equation}\] La fonction a aussi des minima secondaires à chaque fois que \(\frac{Nka}{2}\sin \theta = {m \pi}\), et des maxima secondaires à \(\frac{Nka}{2}\sin \theta = \frac{m \pi}{2}\).

Expliquer, savoir reconnaître et utiliser dans des calculs les fréquences spatiales transverses ;
Savoir calculer et obtenir l’étalonnage d’une transformée de Fourier discrète (numérique) ;
Expliquer et calculer les propriétés d’un filtre spatial, utiliser un filtre spatial sur des faisceaux ou des images.
La propagation d’une onde plane \(\mathbf{k}\) est simple: la valeur en tout point \(\mathbf{r}\) est obtenue par \(e^{i \bf{k \cdot r}}\), en tout point de l’espace 3D. Puisque nous sommes souvent intéressés à une distribution de rayons qui produit un certain patron dans le plan transverse (e.g., un objet illuminé ou une image), on peut prendre une approche qui décrit tout champ comme une somme d’ondes planes, avec une base de vecteurs définie dans le plan transverse. Ceci permettra de s’attarder à la distribution lumineuse et à sa description dans ce fameux plan transverse. Ainsi, on décompose le vecteur d’onde en composantes longitudinales et transverses: \[\begin{equation*} e^{i \bf{k \cdot r}} \equiv e^{i {k_{\parallel} z }} e^{ i{\bf k}_{\perp} \cdot {\boldsymbol \rho} }, \end{equation*}\] avec \[\begin{equation*} {\bf k} = k_{\parallel}\hat{z} + k_\perp \hat{\rho} , \end{equation*}\] \[\begin{equation*} \left| {\bf k}\right|^2 = k_{\parallel}^2 + k_\perp ^2. \end{equation*}\] L’optique de Fourier décrit la distribution dans le plan transverse par un ensemble de composantes de Fourier qui, une fois additionnées ensemble, donne lieu à la distribution lumineuse. Bien que cette description peut être justifiée par une approche mathématique, elle est bien ancrée dans la réalité physique qu’elle décrit. En effet, comme indiqué sur la Figure 3.13, les composantes transverses correspondent à l’angle que fait une onde plane avec l’axe optique. Ainsi, si les règles de l’optique géométrique permettent de transformer un rayon d’une certaine position et un certain angle à une autre position avec un autre angle, l’optique de Fourier reprend cette discussion en termes des composantes transverses des vecteurs d’onde , et décrit un système optique par une fonction de transfert qui permet de transformer une distribution de composantes transverses d’un plan à un autre.
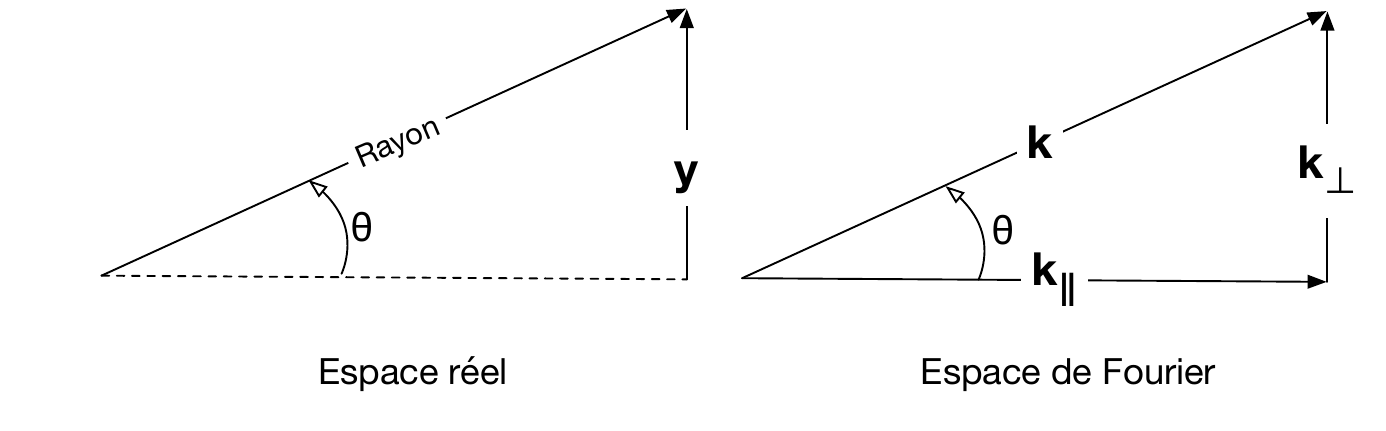
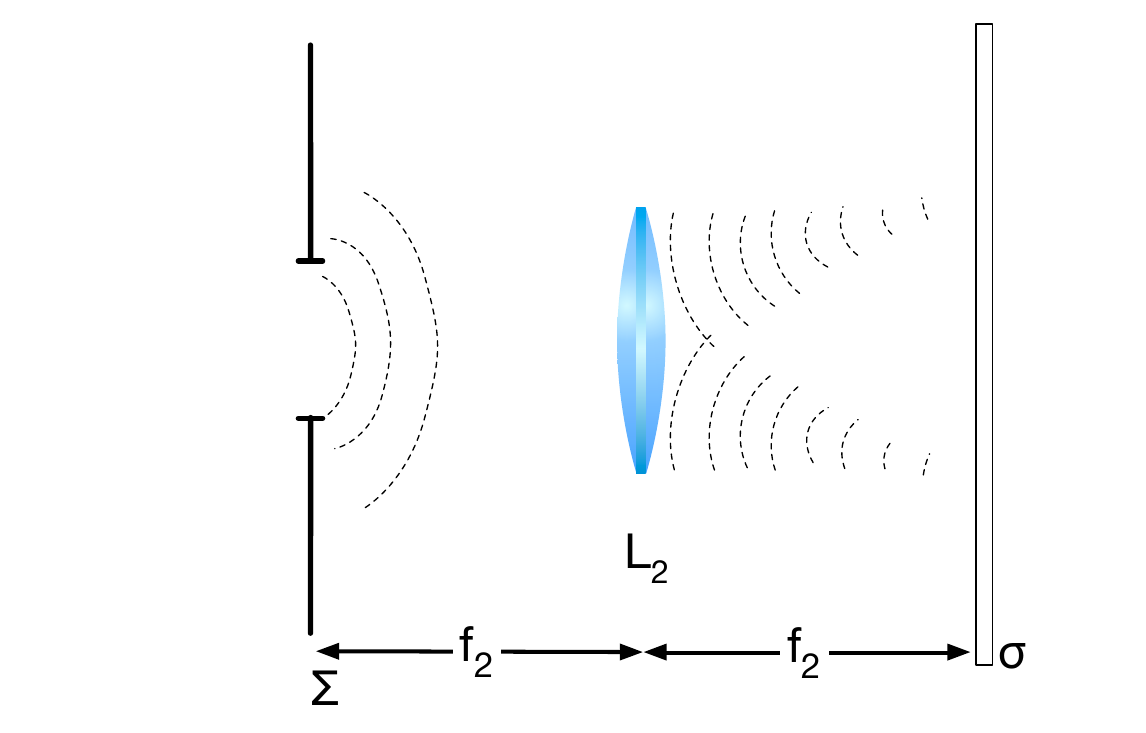
Le montage décrit à la Figure 3.14 illustre l’optique de Fourier. Pour des raisons qui deviendront claires plus bas, dans ce montage, la distribution du champ électrique à l’écran est la transformée de Fourier exacte du champ à l’obstacle \(\Sigma\). On peut s’en convaincre en calculant la matrice de propagation du champ électrique de l’obstacle à l’écran: \[\begin{equation*} {\bf M_{F_2 \rightarrow F_2\prime}} = \left[ \begin{matrix} 1 & f \\ 0 & 1 \end{matrix} \right] \left[ \begin{matrix} 1 & 0 \\ -\frac{1}{f} & 1 \end{matrix} \right] \left[ \begin{matrix} 1 & f \\ 0 & 1 \end{matrix} \right] = \left[ \begin{matrix} 0 & f \\ -\frac{1}{f} & 0 \end{matrix} \right] \end{equation*}\] \[\begin{equation*} \left[ \begin{matrix} r\prime \\ \theta\prime \\ \end{matrix} \right] = \left[ \begin{matrix} 0 & f \\ -\frac{1}{f} & 0 \end{matrix} \right] \left[ \begin{matrix} r \\ \theta \\ \end{matrix} \right] = \left[ \begin{matrix} f \theta \\ -\frac{r}{f} \\ \end{matrix} \right]. \end{equation*}\] Ainsi, un rayon au premier foyer voit sa hauteur et son angle déterminer respectivement l’angle et la hauteur du rayon au foyer.
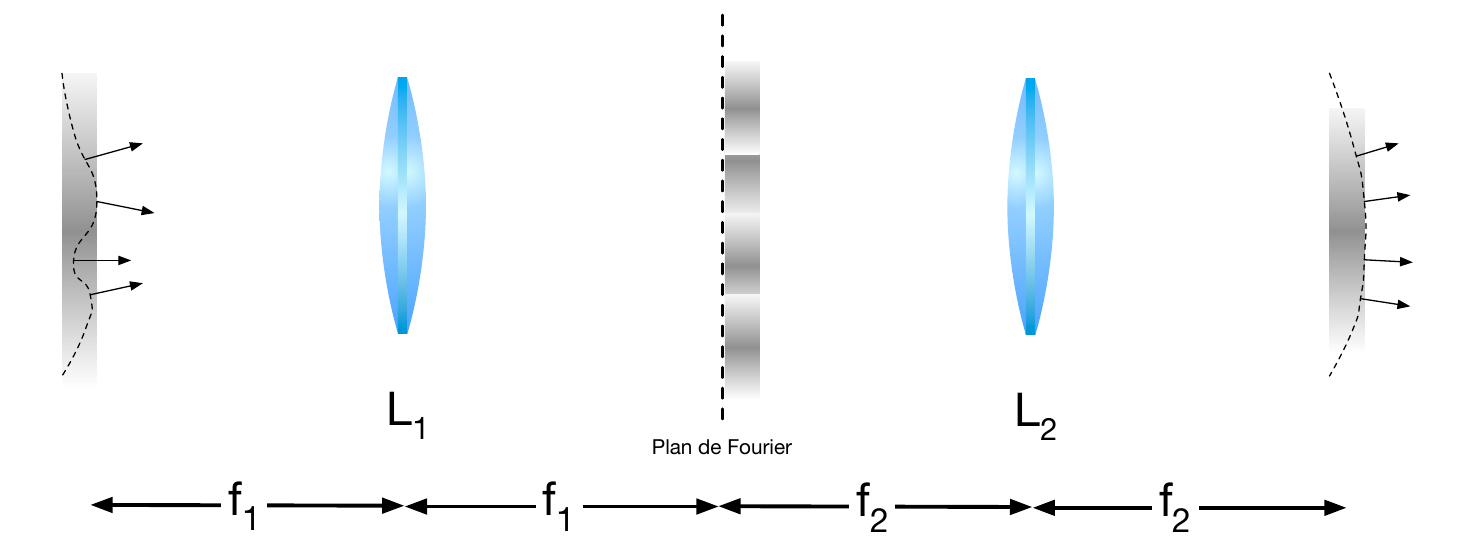
Comprendre, expliquer et définir ce qu’est un faisceau gaussien ;
Connaître les différentes propriétés des faisceaux gaussiens: paramètre de Rayleigh (ou confocal), largeur de faisceau, rayon de courbure ;
Définir et savoir utiliser dans des calculs le rayon complexe d’un faisceau gaussien, savoir extraire la largeur du faisceau et son rayon de courbure ;
Être capable de passer d’une définition de largeur de faisceau à l’autre: champ électrique ou irradiance, 1/e, FWHM, HWHM ;
Résoudre des problèmes utilisant le formalisme matriciel pour la propagation de faisceaux gaussiens et leurs transformations dans des systèmes optiques.
À la section 3.1, nous avons discuté de la diffraction de profils de champs électriques arbitraires et nous avons obtenu grâce au formalisme de la diffraction de Fraunhofer une expression reliant le champ électrique en un plan à son profil plus loin: cette relation est essentiellement une transformée de Fourier. En redérivant l’équation d’onde paraxiale à partir de l’équation d’onde, on peut décrire les faisceaux qui sont près de l’axe de propagation (les ondes paraxiales). L’Exemple 10 d‘un faisceau avec un profil transverse gaussien est particulièrement important parce que son profil transverse de champ électrique reste gaussien lorsqu’il se propage. Ces faisceaux sont souvent désignés simplement par “faisceaux gaussiens”. Ils ont des propriétés générales intéressantes et un formalisme existe pour facilement les manipuler. Ce formalisme définit un rayon de courbure complexe et fait appel au formalisme matriciel, parfois appelé formalisme des matrices ABCD, pour le transformer.
Une onde sphérique paraxiale avec un rayon \(R(z)\), s’écrit:
\[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \frac{\mathbf{E}_\circ}{z}{ e^{-i k \frac{x^2+y^2}{2z} }} . \end{equation}\]
On peut obtenir une solution à l’équation d’onde paraxiale sous la forme d’un faisceau gaussien paraxial: \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \frac{\mathbf{E}_\circ}{q(z)}{ e^{-i k \frac{x^2+y^2}{2q(z)} }} , \end{equation}\] avec la définition: \[\begin{equation} \label{eq:definition_rayon_complexe} \frac{1}{q} \equiv \frac{1}{R(z)} - i \frac{\lambda}{\pi w(z)^2}. \end{equation}\] Ce rayon complexe \(q(z)\) se transforme selon: \[\begin{equation} \label{eq:rayon_complexe} q(z) \equiv z + iz_\circ , \end{equation}\]
avec le paramètre confocal aussi appelé paramètre de Rayleigh \[\begin{equation} \label{eq:parametre_rayleigh} z_\circ \equiv \frac{\pi w_\circ^2}{\lambda} . \end{equation}\]
Ainsi, le faisceau gaussien possède un front d’onde sphérique et une amplitude gaussienne comme: \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \frac{\mathbf{E}_\circ}{q(z)}{ e^{-i k \frac{x^2+y^2}{2R(z)}} e^{- \frac{x^2+y^2}{w(z)^2} }} \end{equation}\]
Ce faisceau a un front d’onde sphérique de rayon \(R(z)\) ;
Le rayon de courbure \(R(z)\) est obtenu par \(\frac{1}{R(z)}={\rm Re}\left\{q(z)^{-1} \right\}\) ;
Ce faisceau a une amplitude de champ électrique de forme gaussienne selon \(x\) et \(y\) ;
La largeur \(1/e\) de cette gaussienne en champ électrique est obtenue par \(w(z) = \sqrt{\frac{\lambda}{\pi\ {\rm Im}\left\{-q(z)^{-1} \right\} }}\) ;
La largeur du faisceau au point d’étranglement (waist) est de \(w_\circ = \sqrt{\frac{ z_\circ \lambda}{\pi}}\) ;
À noter que la définition de la largeur est la distance à laquelle le champ électrique a atteint \(1/e\) de sa valeur maximale. La définition de la largeur ne peut pas être changée de façon arbitraire à la largeur de l’intensité par exemple. Ceci est particulièrement important car en laboratoire, la largeur d’un faisceau est souvent mesurée en intensité avec sa largeur à mi-hauteur (FWHM), et non en champ électrique.
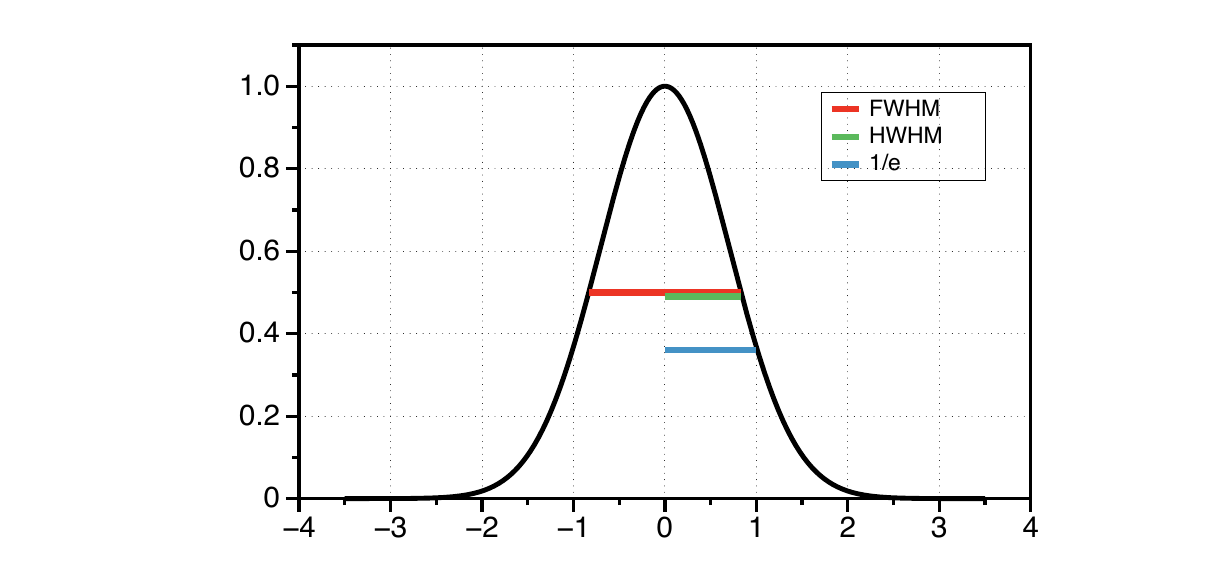
On peut montrer que la transformation d’un rayon complexe par un système arbitraire décrit par une matrice ABCD est donnée par: \[\begin{equation} \label{eq:transformation_rayon_complexe} q\prime =\frac{Aq + B}{Cq+D}. \end{equation}\] Ainsi, l’ensemble des matrices décrites à la section 2.2 et répétées ici à la Table 2.2 peuvent être utilisées pour transformer les faisceaux gaussiens dans les systèmes optiques.
À partir de l’Éq. \(\eqref{eq:transformation_rayon_complexe}\) , on obtient la règle de transformation suivante pour la propagation d’une distance dans l’espace libre : \[\begin{equation} q\prime = q + z , \end{equation}\] qui est identique à l’Éq. \(\eqref{eq:rayon_complexe}\) . On remarque que le paramètre confocal du faisceau (la partie imaginaire du rayon complexe) ne change pas.
Un faisceau gaussien caractérisé par un paramètre confocal se propageant librement à partir du point d’étranglement sur une distance verra sa taille de faisceau élargir selon l’équation suivante: \[\begin{equation} w(z) = w_\circ \sqrt{1 + \left( \frac{z}{z_\circ} \right)^2 } , \end{equation}\] tel qu’obtenu par la définition de l’Éq. \(\eqref{eq:definition_rayon_complexe}\) et la règle de transformation de l’Éq. \(\eqref{eq:rayon_complexe}\) , et illustré à la Figure 3.17. Aux fins de calculs, on peut affirmer que la taille du faisceau est approximativement constante de \(-z\) à \(z\), ce qui est équivalent à dire que le faisceau est collimé sur cette distance, et que sa largeur augmente linéairement avec la distance par la suite. La divergence du faisceau au loin est donc simplement: \[\begin{equation} \theta = \frac{2 \lambda}{\pi w_\circ } . \end{equation}\]
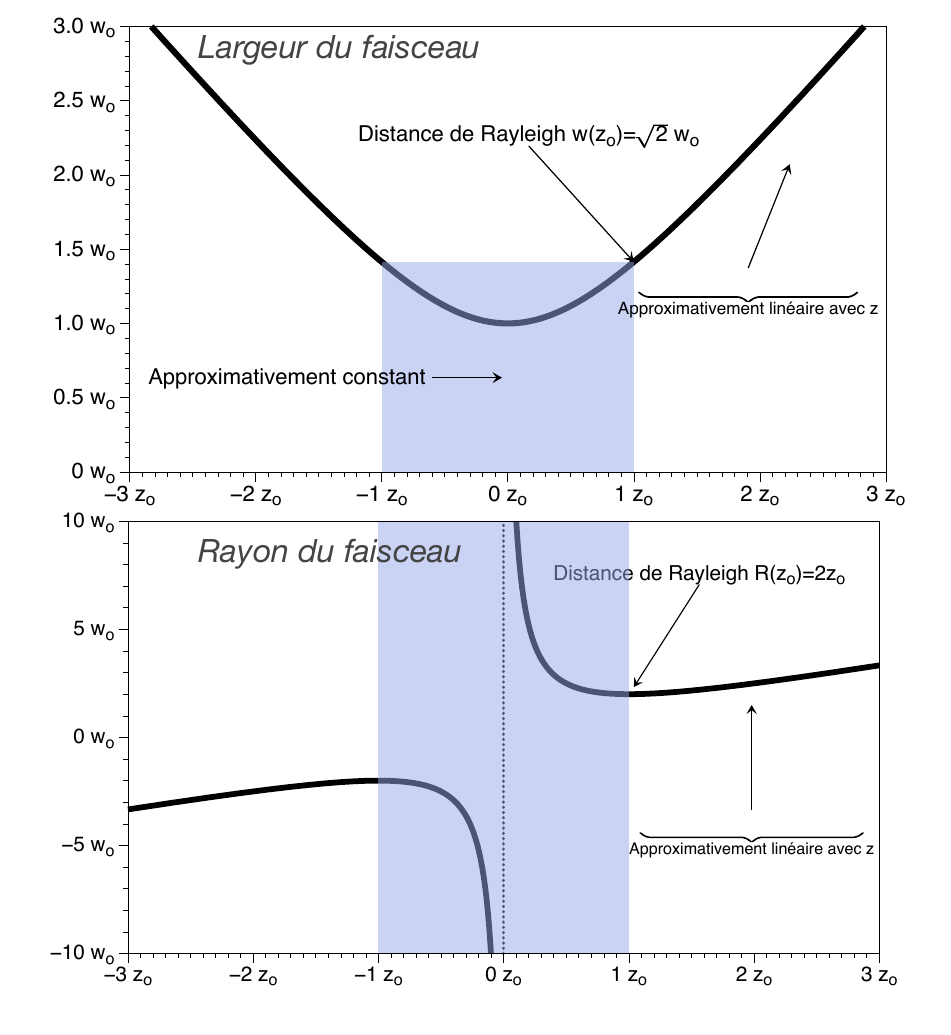
Le rayon de courbure du front d’onde est donné par: \[\begin{equation} R(z) = z \left( 1 + \frac{z_\circ^2}{z^2}\right), \end{equation}\] et illustré à la Figure 3.17.
À partir de l’Éq. \(\eqref{eq:transformation_rayon_complexe}\) , on obtient la règle de transformation pour la propagation à travers une lentille de distance focale \(f\):
\[\begin{equation} q\prime = \frac{q}{-\frac{q}{f}+1} = \frac{fq}{f-q}. \end{equation}\]
Un faisceau gaussien arbitraire \(q = z + iz_\circ\) est incident sur une lentille de distance focale \(f\). Tout de suite après la lentille, on a: \[\begin{equation*} q\prime = \frac{q}{-\frac{q}{f}+1} = \frac{fz + ifz_\circ}{f-z - iz_\circ} . \end{equation*}\] En utilisant le complexe conjugué du dénominateur, on obtient: \[\begin{equation*} q\prime = \frac{(fz + ifz_\circ) (f-z + iz_\circ)}{(f-z)^2 + z^2_\circ} = \frac{fz(f-z) - fz^2_\circ + if^2z_\circ}{(f-z)^2 + z^2_\circ} . \end{equation*}\] La position de l’étranglement après la lentille (i.e. le “point focal”) est obtenue en trouvant la distance qui rend \(1/q\prime\) (donc aussi \(q\)) purement imaginaire (\(\eqref{eq:definition_rayon_complexe}\)). Pour un faisceau collimé: \(\left|f\right| \ll z_\circ, \left|z\right| \ll z_\circ\), on obtient simplement: \(q\prime = -f + i\frac{f^2}{z_\circ}\), donc l’étranglement est comme attendu à une distance focale de la lentille, et le paramètre confocal \(z\prime_\circ=\frac{f^2}{z_\circ}\), donc la taille du faisceau avec l’Éq. \(\eqref{eq:parametre_rayleigh}\) à l’étranglement est \(w\prime_\circ=\frac{\lambda f}{\pi w_\circ}\). On remarque que c’est essentiellement une taille proportionnelle à \(\lambda f/\#^{\text{eff}}\). \(\blacksquare\)
Un faisceau gaussien arbitraire \(q = z + iz_\circ\) est incident sur une lentille de distance focale \(f\). En utilisant le résultat obtenu précédemment: \[\begin{equation*} q\prime = \frac{fz(f-z) - fz^2_\circ + if^2z_\circ}{(f-z)^2 + z^2_\circ} . \end{equation*}\] Pour une onde sphérique: \(\left|f\right| \gg z_\circ, \left|z\right| \gg z_\circ, \left|f-z\right| \gg z_\circ\) , \[\begin{equation*} q\prime = \frac{fz}{(f-z)} + \frac{if^2z_\circ}{(f-z)^2} . \end{equation*}\] On obtient maintenant que l’étranglement est à une distance \(d = -\frac{fz}{(f-z)}\), relation que l’on peut ré-écrire comme \(\frac{1}{d} + \frac{1}{z} = \frac{1}{f}\), ce qui montre que la lentille dans ces conditions fait l’image du point d’étranglement selon les lois de l’optique géométrique. La taille du faisceau à l’étranglement est obtenue par le paramètre confocal que l’on peut écrire comme: \[\begin{equation*} z\prime_\circ = \frac{f^2z_\circ}{(f-z)^2} = \frac{z_\circ}{z^2\left(\frac{1}{z}-\frac{1}{f}\right)^2} = \left(\frac{d}{z} \right)^2 z_\circ = M^2_T z_\circ , \end{equation*}\] dans lequel on reconnait le facteur de grossissement transverse \(M_T\) de l’optique géométrique. La dimension de l’étranglement avec l’Éq. \(\eqref{eq:parametre_rayleigh}\) sera donc de \(w\prime_\circ=\frac{d}{z}w_\circ\).
\(\blacksquare\)
Publication originale définissant le rayon complexe gaussien et les règles de transformations simples utilisant les matrices ABCD par Pierre-A. Bélanger, “Beam propagation and the ABCD ray matrices”, Optics Letters Vol 16, No 4 (1991)
Une onde plane est incidente sur une lentille de distance focale \(f\) et de diamètre \(D\). Quelle est la grosseur de la tache focale?
Stratégie
Ceci est un problème de diffraction par une fente circulaire, car la
lentille bloque l’onde plane incidente. On a donc une illumination
uniforme sur l’ensemble de la fente.
Solution
À partir de la solution de la diffraction d’une fente circulaire de
l’exemple 9: \[\begin{equation*}
I_{\sigma}(r) \approx \frac{ \left|E_\circ\right|^2 \pi a^2}{f^2}
\left[ \frac{2 J_1 \left( \frac{ 2\pi ar}{\lambda f} \right)}{
\frac{2\pi ar}{\lambda f} } \right]^2
\end{equation*}\] on obtient que la largeur, définie comme la
distance entre le maximum et le point où la fonction \(J_1(x)/x\) est nulle, est donné par \(J_1 \left( \frac{ 2\pi a r_\circ}{\lambda f}
\right) = 3.82\), donc \(2r_\circ = 2
\times 1.22 \lambda \frac{f}{2a} = 2.44 \lambda f_{\#}\). La
tache focale, dans le cas où la lentille est remplie par l’illumination,
est environ le double de la longueur d’onde multipliée par le \(f\)-number de la lentille.
Un petit faisceau en forme de disque de diamètre \(d\) est incident sur une lentille de distance focale \(f\) et de diamètre \(D\). Quelle est la grosseur de la tache focale?
Stratégie
Nous avons un problème dangereusement similaire au problème précédent.
Cependant, l’intensité de l’illumination ne s’étend pas sur l’ensemble
de la lentille car le faisceau est plus petit que celle-ci. Ainsi, en
posant le problème de diffraction, l’intégrale sera nulle au-delà du
faisceau, ce qui réduira le diamètre de l’intégrale à \(d\) au lieu de \(D\). On refait donc le problème de la même
façon.
Solution
À partir de la solution de la diffraction d’une fente circulaire de
l’exemple Exemple 3.1.2,, on obtient: \[\begin{equation*}
E_{\sigma}(r) \approx \frac{E_\circ{{e^{i{kf}}}} 2 \pi}{f}
\int_0^{d/2} J_0 \left( \frac{kr\prime r}{f} \right) r\prime dr\prime
\end{equation*}\] \[\begin{equation}
I_{\sigma}(r) \approx \frac{ \left|E_\circ\right|^2 \pi
(d/2)^2}{f^2} \left[ \frac{2 J_1 \left( \frac{ \pi d r}{\lambda f}
\right)}{ \frac{\pi d r}{\lambda f} } \right]^2.
\end{equation}\] On obtient essentiellement la même solution que
le problème précédent, sauf que le diamètre effectif de “blocage” est
\(d\) au lieu de \(D\). On obtient donc \(2r_\circ = 2 \times 1.22 \lambda
\frac{f}{d}\). Dans ce cas, on dit que le faisceau "n’utilise
pas" toute la lentille est que le \(f\)-number effectif est augmenté de \(f^{\rm{eff}}_\# = \frac{D}{d} \times
f_{\#}\) ce qui augmente proportionnellement la grosseur de la
tache focale.
Les deux phares d’une voitures sont séparés par une distance de . Quelle est la distance maximale à partir de laquelle vous pourrez résoudre les deux phares comme étant distincts si votre pupille a un diamètre de et que la longueur d’onde principale est de 550 nm ?
Stratégie L’onde de chaque phare frappe l’ouverture circulaire de l’oeil et diffracte en un disque d’Airy (le champ en fonction de l’angle). Ceci correspond à un ensemble de rayons qui frappent la lentille de l’oeil. On solutionne d’abord en ignorant l’oeil. Ensuite, on montre que finalement, la réfraction à l’interface de l’oeil ne change rien à la résolution.
Solution
Les phares et émettent des ondes sphériques, et chacune diffracte dans
l’ouverture de la pupille. On obtient les champs diffractés selon tout
de suite après la pupille centré sur : \[\begin{equation*}
E_\pm\left( \theta \right) \propto E_\circ\frac{2 J_1 \left( \frac{
\pi D \sin( \theta \pm \phi)}{\lambda } \right)}{ \left( \frac{\pi
D\sin( \theta \pm \phi)}{\lambda } \right)}
\end{equation*}\] On utilise le critère de Rayleigh, c’est-à-dire
le premier minimum (zéro) du patron de diffraction \(E_+(\theta)\) doit être superposé au
maximum du patron de diffraction de l’autre faisceau \(E_-(\theta)\) à \(\phi\). On veut donc: \[\begin{equation*}
E_+(\theta = \phi) = \text{Premier zéro de la fonction }J_1 .
\end{equation*}\] Lorsque l’argument de \(J_1(x)\) est \(\frac{ \pi D \sin( 2\phi)}{\lambda } =
3.82\), nous obtenons \(\phi =
1.22 \frac{\lambda}{2D}\). Par considération géométrique, on
obtient simplement que \(\tan \phi \approx
\phi = \frac{h}{2d}\), donc \(d =
\frac{h D}{1.22 \lambda} = \frac{ 1.5 \text{ m} \times 5 \times 10 ^{-3}
\text{ m} }{1.22 \times 550 \times 10^{-9}\text{ m}}=11\) km.
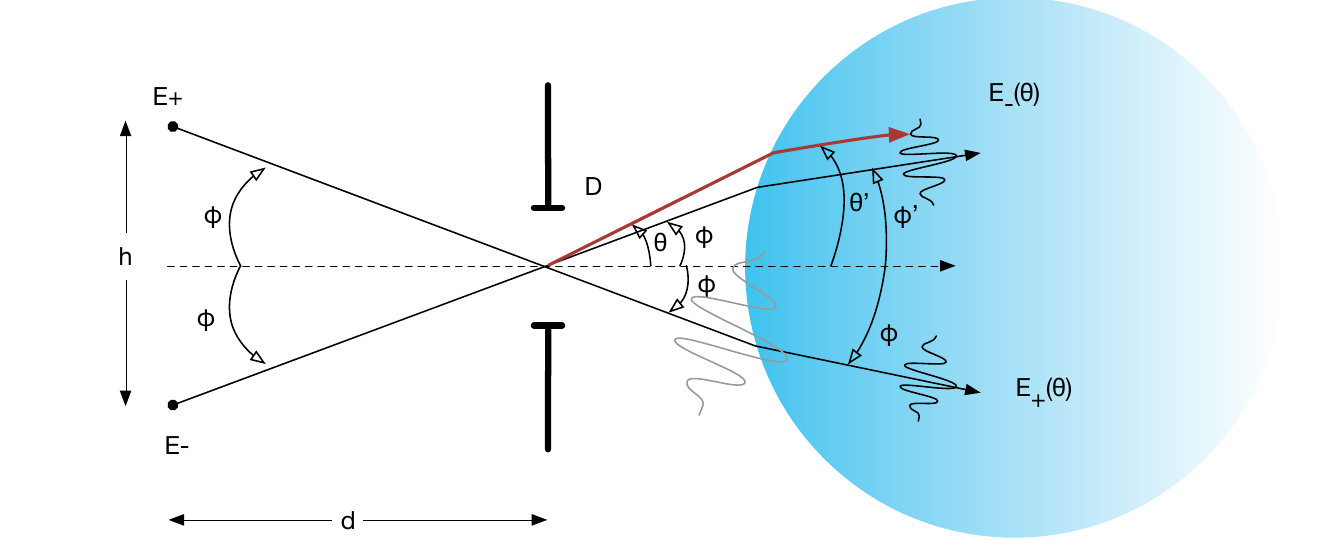
\(x\) moyen: \[\begin{equation*} \bar{x} = \int_{-\infty}^{+\infty} x \left|f(x)\right|^2 dx \bigg/ \int_{-\infty}^{+\infty} \left|f(x)\right|^2 dx \end{equation*}\] \(x^2\) moyen: \[\begin{equation*} \overline{x^2} = \int_{-\infty}^{+\infty} x^2 \left|f(x)\right|^2 dx \bigg/ \int_{-\infty}^{+\infty} \left|f(x)\right|^2 dx \end{equation*}\] Largeur RMS (root mean square): \[\begin{equation*} \Delta x_{\mathrm{RMS}} = \sqrt{\overline{x^2} - \bar{x}^2} \end{equation*}\] (si la fonction est centrée sur 0 alors \(\Delta x_{\mathrm{RMS}} = \sqrt{\overline{x^2}}\))
En optique, la distribution de l’irradiance de la lumière (en puissance par surface) est proportionnelle à la fonction de distribution des photons.
Définition transformée de Fourier: \[\begin{equation*} F(k) \equiv \int_{-\infty}^{+\infty} f(x) e^{-ikx}\, dx \end{equation*}\] Définition transformée de Fourier inverse: \[\begin{equation*} f(x) \equiv \frac{1}{2\pi} \int_{-\infty}^{+\infty} F(k) e^{ikx}\, dk \end{equation*}\]
Une translation dans l’espace réel est une phase dans l’espace de Fourier: \[\begin{equation*} F(k) e^{ikx_\circ} = \int f(x-x_\circ) e^{-ikx}\, dx \end{equation*}\] Une phase dans l’espace réel est une translation dans l’espace de Fourier: \[\begin{equation*} F(k-k_\circ) = \int \left[ f(x) e^{ik_\circ x} \right] e^{-ikx}\, dx \end{equation*}\] La convolution de deux fonctions a comme transformée de Fourier le produit de leurs transformées respectives: \[\begin{equation*} \text{Si } h(u) = \int_{-\infty}^{\infty} f(x) g(u-x)\, du, \quad \text{alors } H(k) = F(k) G(k) \end{equation*}\] Le produit de deux fonctions a comme transformée de Fourier la convolution de leurs transformées: \[\begin{equation*} \text{Si } H(\nu) = \int_{-\infty}^{\infty} F(k) g(\nu-k)\, d\nu, \quad \text{alors } h(x) = f(x) g(x) \end{equation*}\]
\[\begin{equation*} \Delta x_{\mathrm{RMS}} \Delta k_{\mathrm{RMS}} \ge \frac{1}{2} \end{equation*}\] (\(\Delta x_{\mathrm{RMS}} \Delta k_{\mathrm{RMS}} = \frac{1}{2}\) si et seulement si \(f(x)\) est une Gaussienne)
Gaussienne: \[\begin{equation*} \int_{-\infty}^{+\infty} e^{-\frac{x^2}{a^2}} e^{-ikx}\, dx = a\sqrt{\pi}\, e^{-\frac{a^2 k^2}{4}} \end{equation*}\]
Fonctions de Bessel \(J_m(u)\): \[\begin{equation*} J_m(u) = \frac{i^{-m}}{2\pi} \int e^{im\phi + iu\cos\phi}\, d\phi \end{equation*}\] Propriétés: \[\begin{equation*} \frac{d}{du}\left[ u^m J_m(u) \right] = u^m J_{m-1}(u) \end{equation*}\] \[\begin{equation*} \int_0^u u' J_0(u')\, du' = u\, J_1(u) \end{equation*}\]
La transformée de Fourier est un outil mathématique qui permet de représenter une fonction par une autre fonction qui contient la même information totale, mais d’une façon différente. On peut parler de série temporelle ou de son spectre par exemple, les deux contenant la même information mais la présentant différemment. Cette section présente les notions pratiques de base pour pouvoir adéquatement analyser un signal et obtenir son spectre de Fourier, étalonné correctement.
La transformée de Fourier est définie pour une fonction connue \(f(x)\) comme: \[\begin{equation*} F(k) = \int_{-\infty}^{+\infty} f(x) e^{ikx} dx \end{equation*}\] et sa transformée inverse est ainsi: \[\begin{equation*} f(x) = \frac{1}{2\pi} \int_{-\infty}^{+\infty} F(k) e^{-ikx} dk . \end{equation*}\] La variable \(k\) est la variable conjuguée de \(x\) et correspond à une fréquence angulaire \(k=2 \pi \nu\), la fonction \(F(k)\) est souvent appelée le spectre de \(f(x)\). Notons que la variable \(x\) peut-être une variable d’espace (m) ou de temps (s). Ainsi, la variable conjuguée \(k\) aura respectivement des unités de rad\(\cdot\)m\(^{-1}\) ou rad\(\cdot\)s\(^{-1}\), et la variable \(nu\) aura des unités de \(m^{-1}\) ou \(s^{-1}\). Pour calculer cette transformation, la fonction \(f(x)\) doit être connue sur l’intervalle complet de \(-\infty\) à \(+\infty\). Au laboratoire, on peut mesurer des signaux par échantillonnage discret: plutôt que d’avoir la représentation continue du signal, on ne connait la valeur de la fonction qu’à certains points discrets \(x_j = j \Delta x\). On écrira parfois simplement \(f[x_i]\), pour rappeler la syntaxe informatique pour l’accès d’un tableau. On définit la transformée de Fourier discrète comme: \[\begin{equation*} F[\nu_i] = \sum_{j=0}^{N-1} f[x_j] e^{i 2 \pi \nu_i x_j} \end{equation*}\] et sa transformée inverse: \[\begin{equation*} f[x_i] = \frac{1}{N} \sum_{j=0}^{N-1} F[\nu_j] e^{-i 2 \pi \nu_j x_i}. \end{equation*}\] Ainsi, avec un tableau de données \(f\) contenant \(N\) points, on peut obtenir un second tableau \(F\) contenant aussi \(N\) points. Si l’espacement entre les points de \(f\) est de \(\Delta X\), l’étendue du tableau est de \(N \Delta X\). Après transformation de Fourier, le tableau en \(F\) sera défini de \(] -\nu_{\mathrm{max}}, \nu_{\mathrm{max}} ]\) avec: \[\begin{equation*} \Delta \nu = \frac{1}{N \Delta X} , \end{equation*}\] \[\begin{equation*} \nu_{\mathrm{max}} = \frac{1}{2 \Delta X} . \end{equation*}\]
Notez:
La transformée de Fourier discrète est définie sur les fréquences négatives et positives, de \(-\nu_{\mathrm{max}}\) à \(\nu_{\mathrm{max}}\).
Avec une fonction réelle \(f(x)\), les composantes négatives et positives des fréquences seront identiques et réelles.
La composante \(F[0]\) est la composante continue, ou DC, ou dit autrement la moyenne du signal \(f[x]\) .
La grande majorité des programmes (MATLAB, Mathematica, etc...) retourne le tableau en commençant par les composantes positives suivi par les composantes négatives.
La grande majorité des programmes (MATLAB, Mathematica, etc...) travaille dans l’espace de Fourier avec \(\nu\), et non \(k=2 \pi \nu\). Ceci correspond mieux à la réalité (i.e. les fréquences sont des vraies fréquences, comme par exemple 60 Hz est 60 Hz, pas 376 rad Hz).
Les composantes \(\nu_{\mathrm{max}}\) et \(-\nu_{\mathrm{max}}\) sont identiques et sont au \(N/2\)-ième point du tableau.
La première composante du tableau est celle correspondant à \(0 \Delta \nu\), suivie de \(\Delta \nu\), \(2 \Delta \nu\), etc... jusqu’à \((N/2) \Delta \nu\). Le dernier point du tableau est \(- \Delta \nu\), l’avant dernier est \(-2\Delta \nu\), précédé par \(-3 \Delta \nu\). Vous pourrez vérifier que le point que le dernier point du tableau est égal au deuxième, etc...
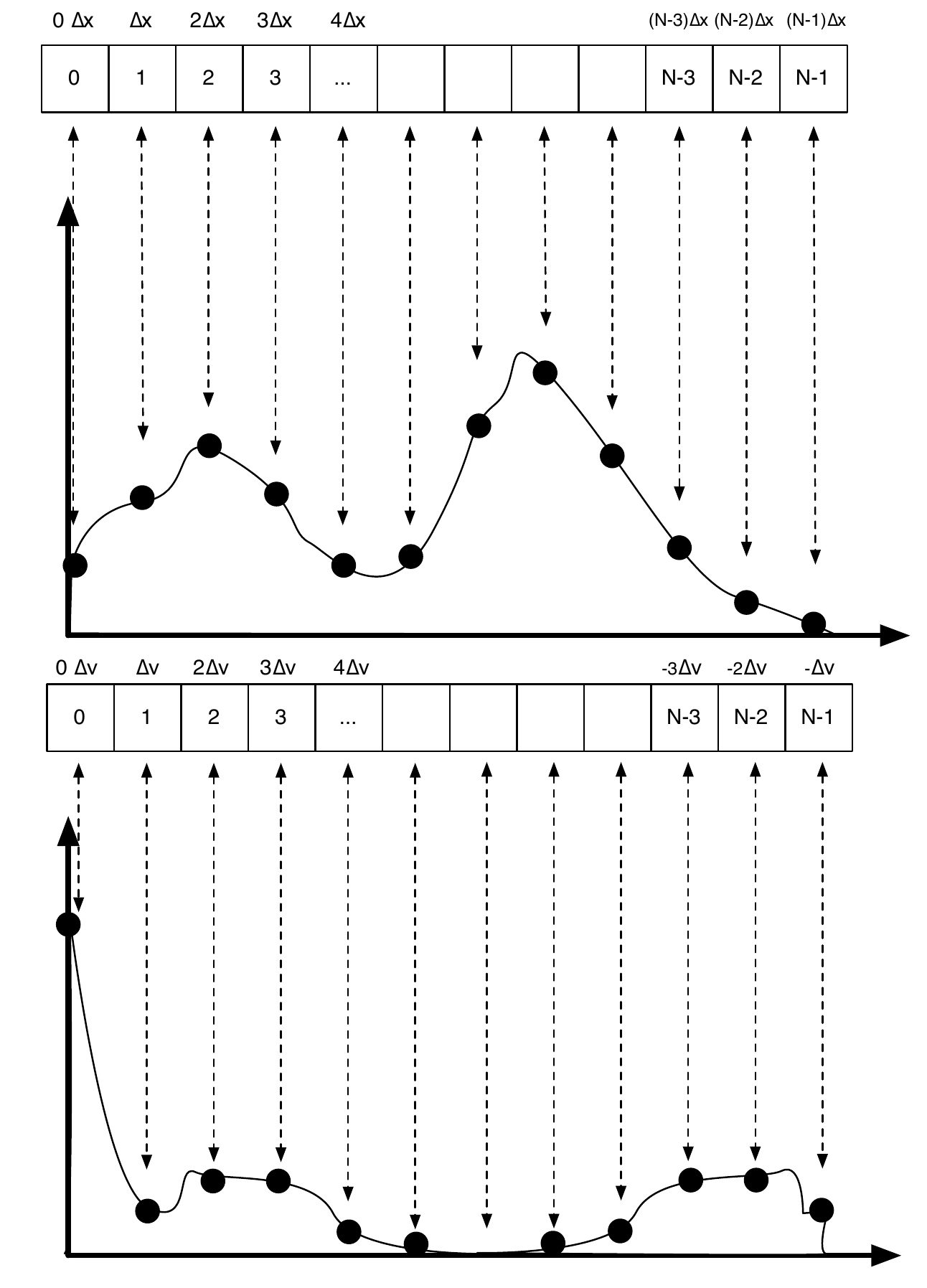

Expliquer l’origine de l’optique non-linéaire en terme de densité de polarisation et susceptibilité ;
Expliquer l’importance de l’accord de phase et évaluer sa valeur numérique ;
Nommer des techniques pour obtenir l’accord de phase (critique et non-critique) ;
Être capable de choisir un cristal non-linéaire qui maximise la génération de fréquence voulue.
L’équation d’onde avec source peut s’écrire: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ\epsilon_\circ \frac{\partial^2 \mathbf{E}}{\partial t^2} = \mu \frac{\partial^2 \mathbf{P}}{\partial t^2} . \end{equation}\] La polarisation, en général, est reliée au champ électrique par: \[\begin{equation} \mathbf{P} = {\epsilon_o}\chi \cdot \mathbf{E} + {\epsilon_o}\chi^2 : \mathbf{E} \mathbf{E}+... \end{equation}\] Dans le cas simple où la polarisation est simplement \(\mathbf{P} = {\epsilon_o}\chi \cdot \mathbf{E}\), on obtient après remplacement: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ\epsilon_\circ \frac{\partial^2 \mathbf{E}}{\partial t^2} = \mu_\circ \frac{\partial^2 \mathbf{\epsilon_\circ \chi E}}{\partial t^2} , \end{equation}\] \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}}{\partial t^2} = 0 . \end{equation}\] avec \(\epsilon \equiv \epsilon_\circ \left(1+ \chi \right)\), la solution à cette équation est de plusieurs formes dont l’onde plane: \[\begin{equation} \mathbf{E}\left( \mathbf{r}, t\right) = \mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right) } + \text{c.c.} \end{equation}\]
Pour traiter la réponse non-linéaire de la polarisation, on peut écrire \[\begin{equation} \mathbf{P} = {\epsilon_o}\chi \cdot \mathbf{E} + \mathbf{P}^{\rm NL} , \end{equation}\] avec \[\begin{equation} \mathbf{P}^\mathrm{NL} = {\epsilon_o}\chi^2 : \mathbf{E} \mathbf{E}+{\epsilon_o}\chi^3 : \mathbf{E} \mathbf{E} \mathbf{E} + ... , \label{eq:reponse-non-lineaire-polarisation} \end{equation}\] où on définit la susceptibilité non-linéaire \(\chi^2,\chi^3,...\). Par simplicité, on note seulement \(\chi^2,\chi^3,...\) mais chaque terme dépend en fait des fréquences impliquées: \(\chi^2(\omega_1,\omega_2)\), \(\chi^3(\omega_1,\omega_2,\omega_3)\), etc. Rappelons que l’Éq. \(\eqref{eq:reponse-non-lineaire-polarisation}\) est la relation mathématique la plus générale reliant deux quantités vectorielles. Il s’agit d’une expansion de Taylor tensorielle. La valeur exacte des différents termes \(\chi^2,\chi^3,...\) est une propriété des matériaux et peut être mesurée en laboratoire ou calculée par modèle simple (tel que l’oscillateur) ou par modèle plus complexe (faisant appel à la mécanique quantique).
Avec l’Éq. \(\eqref{eq:reponse-non-lineaire-polarisation}\) on obtient l’équation d’onde avec sources suivante: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E} + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}}{\partial t^2} = \mu_\circ \frac{\partial^2 \mathbf{P^\mathrm{NL}}}{\partial t^2} . \label{eq:equation_onde_avec_sources} \end{equation}\]
Prenons le temps de comprendre l’importance du terme de source \(\mathbf{P}^\mathrm{NL}\). Dans le cas où l’on considère uniquement le premier terme non-linéaire \({\epsilon_o}\chi^2 : \mathbf{E} \mathbf{E}\), on voit rapidement qu’une onde monochromatique à la fréquence \(\omega\) ne peut plus être la solution de l’équation d’onde avec sources car on obtient des termes supplémentaires oscillant à de nouvelles fréquences: \[\begin{align} \mathbf{\nabla}^2 \left( \mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.} \right) + \mu_\circ\epsilon \frac{\partial^2 \left(\mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.} \right)}{\partial t^2} \nonumber & \overset{?}{=} \\ \epsilon_\circ \mu_\circ \chi^2 \frac{\partial^2 \left(\mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.}\right)\left(\mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.}\right)}{\partial t^2} & \end{align}\] \[\begin{align} \mathbf{E}_\circ \left[\mathbf{\nabla}^2 e^{i\mathbf{k} \cdot \mathbf{r} } -\omega^2 \mu_\circ\epsilon e^{i\mathbf{k} \cdot \mathbf{r} } \right] e^{-i \omega t } & \ne \nonumber\\ & \left[ -\omega^2 \epsilon_\circ \mu_\circ \chi^2 \mathbf{E}_\circ^2 e^{i 2\mathbf{k} \cdot \mathbf{r}} \right] e^{- 2i\omega t} + \text{...} \end{align}\]
La source de ce problème vient du terme \(\mathbf{P}^\mathrm{NL}\) qui crée de nouvelles fréquences en multipliant les champs électriques originaux. Ainsi, on ne peut trouver de solution car le terme à gauche oscille à une fréquence différente du terme de droite. Si l’on considère seulement le deuxième ordre, l’onde sinusoïdale à \(\omega\) créera des ondes à \(\omega + \omega = 2\omega\) et \(\omega-\omega = 0 \text{ ou DC}\): \[\begin{align} \left( \mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.} \right) \left( \mathbf{E}_\circ e^{i \left(\mathbf{k} \cdot \mathbf{r} - \omega t\right)} + \text{c.c.} \right) = \\ \mathbf{E}_\circ^2 e^{i \left(2\mathbf{k} \cdot \mathbf{r} - 2\omega t\right)} + \mathbf{E}_\circ^{*2} e^{-i \left(2\mathbf{k} \cdot \mathbf{r} - 2\omega t\right)} + 2\left|\mathbf{E}_\circ\right|^2 . \end{align}\]
Ainsi, on doit à tout le moins tenter la solution avec trois ondes monochromatiques de fréquences \(\omega\), \(2\omega\) et \(\text{DC}\), et on voit que leur amplitude est donnée par le carré de l’amplitude de la fréquence originale. On voit rapidement que les nouvelles ondes se mélangeront et créeront elles-mêmes de nouvelles fréquences. Cette non-linéarité rend les équations théoriquement intractables puisque toute nouvelle fréquence générera elle-même de nouvelles fréquences qui se propageront selon les équations d’ondes et ainsi de suite. Cependant, cet argument mathématique est supplanté par la réalité physique.
Les nouvelles ondes générées partiront d’une amplitude nulle pour se propager et possiblement croître. Ainsi, si l’on insistait pour considérer leur mélange, l’amplitude des termes générés sera proportionnelle à l’amplitude (faible) de ces nouvelles fréquences multipliée par une autre amplitude (faible s’il s’agit d’une nouvelle fréquence ou élevée s’il s’agit d’un mélange avec l’onde originale). Ces termes sont négligeables par rapport aux termes originaux à \(\omega\) ou aux fréquences non-linéaires à \(2\omega\) ou DC générées dès le début. De plus, un phénomène que nous verrons plus loin (l’accord de phase) permet d’isoler un terme particulier qui bénéficiera d’une amplification dominante. On peut donc tronquer l’expansion à un ordre donné pour des fréquences particulières.
Commençons par le cas le plus simple dans le but d’isoler les phénomènes importants. Nous verrons que tous les phénomènes non-linéaires exhibent des propriétés similaires. Si l’on considère seulement les termes au deuxième ordre dans l’Éq. \(\eqref{eq:equation_onde_avec_sources}\) et seulement le terme à \(2 \omega\), on obtient \(\mathbf{P}^\mathrm{2\omega} = {\epsilon_o}\chi^2 : \mathbf{E}^2\) et deux équations couplées: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E}_\omega + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}_\omega}{\partial t^2} = 0 \end{equation}\] \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E}_{2\omega} + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}_{2\omega}}{\partial t^2} = \mu_\circ \epsilon_\circ \chi^2 \frac{\partial^2 \mathbf{E}_{\omega}^2 }{\partial t^2} . \end{equation}\] La première équation est simplement l’équation de propagation d’une onde incidente oscillant à \(\omega\), alors que la deuxième est une onde oscillant à \(2\omega\), générée par l’onde à \(\omega\). Dans ce cas très particulier, on peut simplement solutionner pour \(E_\omega\) si l’on suppose que l’enveloppe de \(E_\omega\) varie très peu et ensuite remplacer dans la deuxième équation: \[\begin{equation} \mathbf{E}_\omega \left( \mathbf{r}, t\right) = \mathbf{E}_\omega e^{i \left(\mathbf{k}_\omega \cdot \mathbf{r} - \omega t\right) } + \text{c.c.} \end{equation}\] pour obtenir après avoir appliqué la dérivée partielle double à droite l’équation différentielle non-homogène suivante: \[\begin{equation} \mathbf{\nabla}^2 \mathbf{E}_{2\omega} + \mu_\circ\epsilon \frac{\partial^2 \mathbf{E}_{2\omega}}{\partial t^2} = - 4\omega^2 \mu_\circ \epsilon_\circ \chi^2 \mathbf{E}_{\omega}^2 e^{i (\mathbf{2k_\omega \cdot r} - 2\omega t) } . \end{equation}\] La solution de cette équation est (voir l’Exemple 14 pour les détails): \[\begin{equation} \mathbf{E}_{2\omega}(\mathbf{r}\prime,t) = - 4\omega^2 \mu_\circ \epsilon_\circ \chi^2 \mathbf{E}_{\omega}^2 e^{i (\mathbf{k_{2\omega}} \cdot \mathbf{r}\prime - 2\omega t)} \int \frac{e^{i (\mathbf{2k_\omega - k_{2\omega}}) \cdot \mathbf{r} } d\mathbf{r}}{\left| \mathbf{r}\prime - \mathbf{r}\right|} . \end{equation}\] En supposant que l’on s’intéresse aux positions \(r\prime\) loin de \(r\), on peut sortir le dénominateur de l’intégrale: \[\begin{equation} \mathbf{E}_{2\omega}(\mathbf{r}\prime,t) = - 4\omega^2 \mu_\circ \epsilon_\circ \chi^2 \mathbf{E}_{\omega}^2 \frac{e^{i (\mathbf{k_{2\omega}} \cdot \mathbf{r}\prime - 2\omega t)}}{\left| \mathbf{r}\prime \right|} \int {e^{i (\mathbf{2k_\omega - k_{2\omega}}) \cdot \mathbf{r} } d\mathbf{r}} \end{equation}\] \[\begin{equation} \mathbf{E}_{2\omega}(\mathbf{r}\prime,t) = - 4\omega^2 \mu_\circ \epsilon_\circ \chi^2 L \mathbf{E}_{\omega}^2 e^{i (\mathbf{k_{2\omega}} \cdot \mathbf{r}\prime - 2\omega t)} \left[ \frac{\sin \left( \Delta k L\right)}{ \Delta k L} \right] . \end{equation}\]
Tout d’abord, on voit que le faisceau incident génère une nouvelle onde au double de la fréquence. Ce phénomène s’appelle la génération de deuxième harmonique. On fait appel à ce phénomène pour générer de nouvelles fréquences à partir d’un laser donné. On doit utiliser un cristal pour lequel le coefficient non-linéaire est élevé et qui maximise la conversion vers cette deuxième harmonique. Le terme \(\int {e^{i (\mathbf{2k_\omega - k_{2\omega}}) \cdot \mathbf{r} } d\mathbf{r}}\) est le terme d’accord de phase (ou phase-matching en anglais) qui est égal à: \[\begin{equation} \int {e^{i (\mathbf{2k_\omega - k_{2\omega}}) \cdot \mathbf{r} } d\mathbf{r}} = L \frac{\sin \left( \Delta k L\right)}{ \Delta k L} , \end{equation}\] avec \(\Delta \mathbf{k} = \mathbf{2k_\omega - k_{2\omega}} = \frac{2\omega}{c}({n_\omega - n_{2\omega}})\) et \(L\) la longueur typique du milieu non-linéaire. La fonction est maximale lorsque \(\Delta {k} L = 0\) (Figure 4.1). On obtient ceci sous une des deux conditions suivantes:
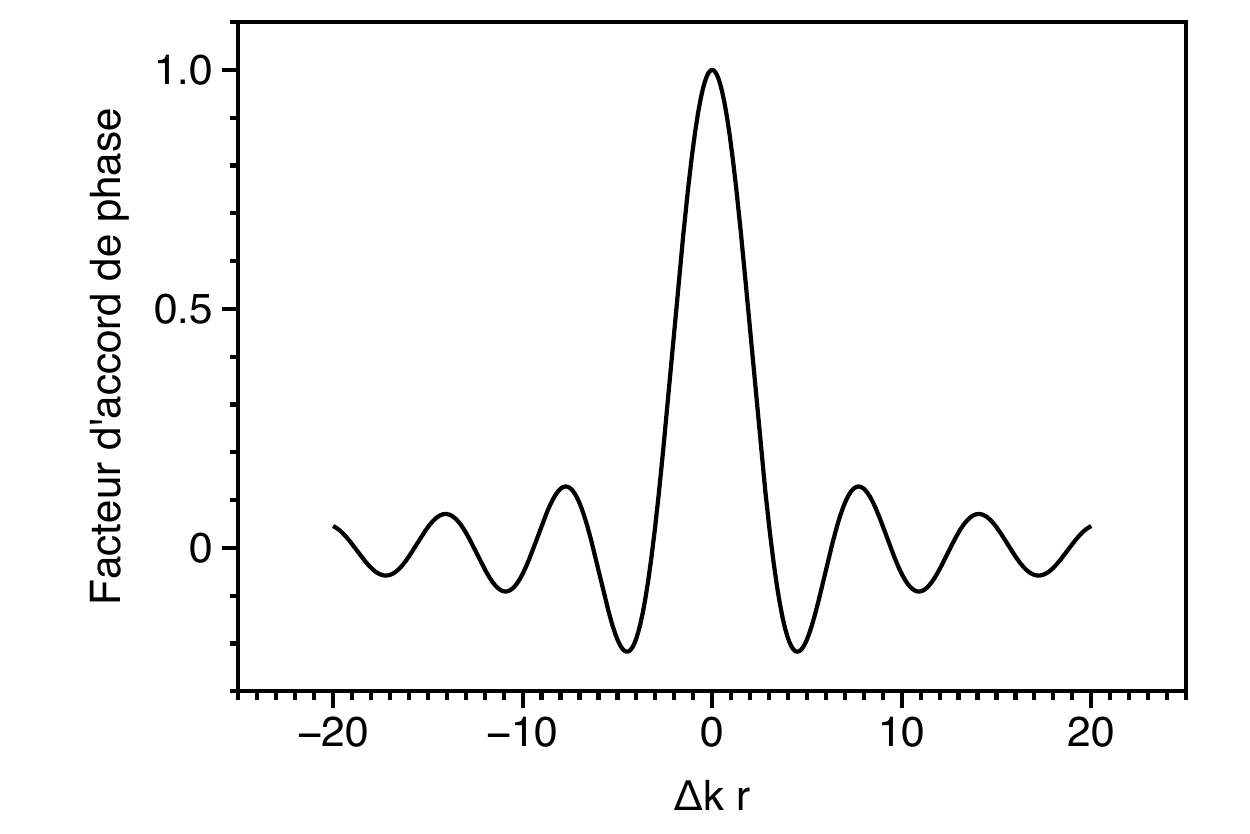
Lorsque \(L = 0\), ce qui veut dire que le milieu non-linéaire est très petit comparativement à la longueur d’onde
Lorsque \(\Delta k = 0\), ce qui veut dire que les indices de réfraction à \(\omega\) et \(2\omega\) sont identiques.
Pour obtenir une génération maximale, on utilise un matériel biréfringent pour lequel \(n_\omega = n_{2\omega}\). Ceci est possible de deux façons: on peut prendre l’onde à \(\omega\) et \(2\omega\) avec deux polarisations différentes, soit ordinaire et extraordinaire. On ajuste alors l’indice de réfraction de l’onde extraordinaire en ajustant l’angle de propagation dans le matériau (accord de phase critique). On peut aussi ajuster la température du matériau pour changer l’indice de réfraction (accord de phase non-critique).
Le développement suivant l’équation d’onde non-linéaire avec sources \(\eqref{eq:equation_onde_avec_sources}\) peut se faire pour d’autres combinaisons de fréquences. On obtient alors différents phénomènes, tels la rectification optique, l’indice de réfraction non-linéaire, l’effet Kerr, la génération de deuxième ou troisième harmonique ou encore l’effet Raman cohérent.
Pour solutionner une équation différentielle non-homogène, on utilise le formalisme des fonctions de Green. La fonction de Green est la solution de l’équation homogène avec un terme de source en delta de Dirac: \[\begin{equation} \mathbf{\nabla}^2 G(\mathbf{r},t) + \mu_\circ\epsilon \frac{\partial^2 G(\mathbf{r},t)}{\partial t^2} = \delta(\mathbf{r},t) . \end{equation}\] La fonction de Green pour ce cas particulier (milieu infini) est \(G(\mathbf{r},t) = \frac{e^{ i \mathbf{k \cdot (\mathbf{r}\prime - \mathbf{r}) } + i \omega t}}{\left| \mathbf{r}\prime - \mathbf{r} \right|}\), donc la solution pour notre problème est obtenue en solutionnant l’équation intégrale suivante: \[\begin{equation} \mathbf{E}_{2\omega}(\mathbf{r}\prime, t\prime) = - 4\omega^2 \mu_\circ \epsilon_\circ \chi^2 \mathbf{E}_{\omega}^2 \int \frac{e^{i \mathbf{k_{2\omega} \cdot (\mathbf{r}\prime - \mathbf{r}) } - i 2\omega t\prime}}{\left| \mathbf{r}\prime - \mathbf{r} \right|} e^{i \mathbf{2k_\omega \cdot r} - i2\omega t } d\mathbf{r} . \end{equation}\] Notez que dans la fonction \(G(\mathbf{r}\prime, \mathbf{r})\), on retrouve \(\mathbf{r}\prime-\mathbf{r}\), et non \(\mathbf{r}-\mathbf{r}\prime\). La fonction de Green pour un problème donné est aussi appelée fonction d’influence car elle représente l’influence d’une source ponctuelle à une distance et un temps donnés. Pour plus d’information, allez voir la section Pour en savoir plus à la fin de ce chapitre. \(\blacksquare\)
Le livre "Nonlinear optics" par R. Boyd (ISBN: 978-0-12-121682-5) est la meilleure référence dans le domaine et évite les lourdeurs mathématiques dans une première dérivation pour ensuite traiter avec rigueur l’ensemble des problèmes.
Le livre de Y.R Shen "The principles of nonlinear optics" (ISBN: 978-0-471-43080-3) est la référence originale, moins poussée au niveau mathématique que Boyd mais suffisante pour une première initiation.
Les fonctions de Green.
Pour solutionner les équations différentielles linéaires non-homogènes,
le formalisme mathématique de base est expliqué très bien par le Prof.
Glasner sur le site web de son cours .
Le meilleur livre de mathématiques pour physiciens est "Mathematical Methods for Physicists" (ISBN 978-0123846549) de G.B. Arfken. Le chapitre 4 explique clairement l’importance et l’utilité des tenseurs.
Avril 2026
Renommage cohérent de toutes les figures (minuscules, tirets, noms français)
Figures du chapitre 1 regroupées dans leur répertoire
Image de couverture pour l’historique des versions
Textes de résumé corrigés pour le glossaire et l’historique
Liens vers les exemples résolus en numéros cliquables (version Web)
Avril 2026
Correction de la légende manquante (accord de phase, chapitre 4)
Ajout de la largeur manquante sur 5 figures (chapitres 3 et 4)
Correction de variables manquantes (\(d_o\), \(d_i\)) dans la section sur la loi de l’imagerie
Ajout du titre manquant sur l’exemple « Fente de longueur infinie »
Numérotation de toutes les sous-sections (objectifs, références, etc.)
Nettoyage des fichiers inutiles (environments.tex, sample.bib, etc.)
Avril 2026
Première version disponible en HTML sur le Web
Corrections orthographiques et grammaticales
Ajout d’un glossaire interactif avec liens cliquables (version Web)
Amélioration des figures et des légendes
Mars 2026
Réorganisation des fichiers et nettoyage du projet
Corrections de variables manquantes dans les équations
2025
Deuxième édition avec Mireille Quémener
Migration vers la classe LegrandOrangeBook
Ajout du chapitre sur l’optique non-linéaire
Ajout du glossaire et de la table des symboles
2018
Première édition du livre
Chapitres sur les ondes électromagnétiques, l’optique géométrique et l’optique ondulatoire